Controller Overview
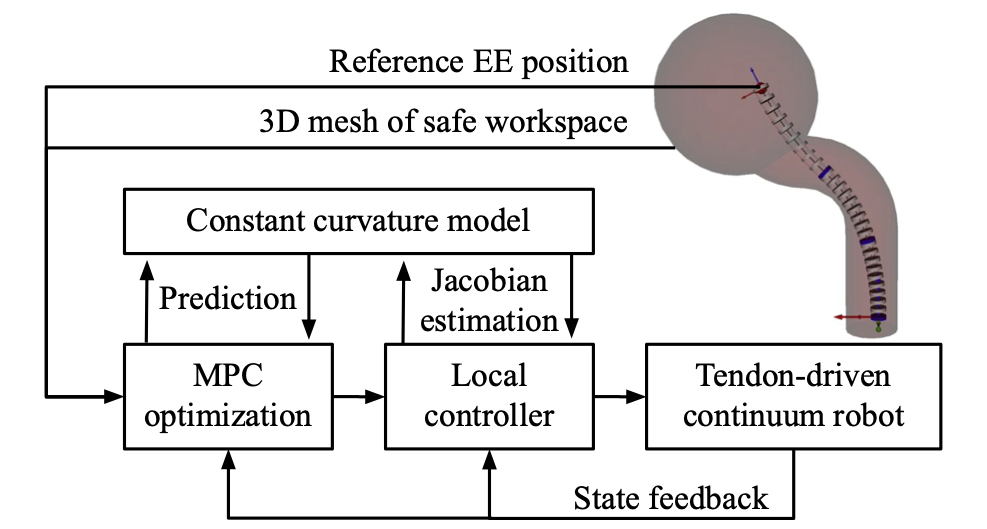
We integrate a nominal MPC for tip tracking and collision avoidance, with a local controller for disturbance rejection. The PCC model provides efficency for real-time performance, while the hierarchical architecture provides robustness against modeling uncertainty and disturbances.
To the best of the authors' knowledge, this is the first controller capable of handling general shape constraints and joint velocity limits for a TDCR. Compared to a Jacobian-based controller, the MPC allows for straightforward imposition of hard limits on actuator speed and EE speed. Defining the feasible workspace can be easily accomplished using a 3D mesh, which is more challenging with a Jacobian-based approach. Overall, the MPC controller demonstrated distinct advantages in three key aspects:
- Explicit collision avoidance constraints
- Stability and convergence under disturbances
- Straightforward formulation of control limits