Chengnan (Jimmy) Shentu is a Ph.D. candidate in Computer Science at the University of Toronto. His research interests are modeling and control for continuum robots.
Before joining CRL as a Ph.D. Student in September 2022, Jimmy completed his undergraduate thesis with the lab. Jimmy obtained his B.A.Sc. in Engineering Science majoring in Robotics and minoring in Artificial Intelligence from the University of Toronto in April 2022 with honours.
Awards
2025-2026 UofT Robotics Institute Fellow
2025-2026 Ontario Graduate Scholarship
Publications
Sampling-Based Follow-the-Leader Motion Planning for Manipulator-Mounted Continuum Robots
Chengnan Shentu, Nicholas Baldassini, Daniel Iseoluwa, Radian Gondokaryono, Jessica Burgner-Kahrs
Robotics: Science and Systems (accepted), 2026.
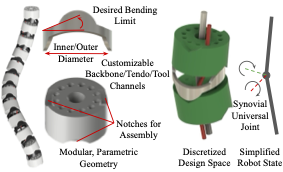
CRAFT: A 3D-printed Modular Design Framework for Task-specific Continuum Robots
Puspita Triana Dewi, Chloe Pogue, Chengnan Shentu, Andrea Gotelli, Jessica Burgner-Kahrs
Nature partner journal npj Robotics, 2026.
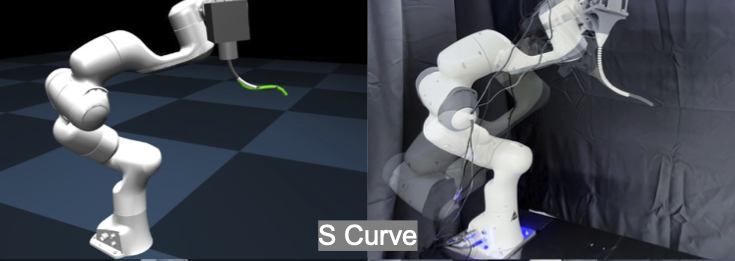
Do Rigid-Body Simulators Dream of Soft Robots? Learning Contact-Rich Manipulation for Tendon-Driven Continuum Robots
Chengnan Shentu, Nicholas Baldassini, Tongjia Zheng, Priyanka Rao, Jessica Burgner-Kahrs
arXiv preprint arXiv:2606.22397, 2026.
Automating Tension Calibration for Tendon-Driven Continuum Robots: A Low-Cost Approach Towards Consistent Teleoperation
Kyum Lee, Chengnan Shentu, Chloe Pogue, Jessica Burgner-Kahrs
IEEE International Conference on Robotics and Automation, 2025.
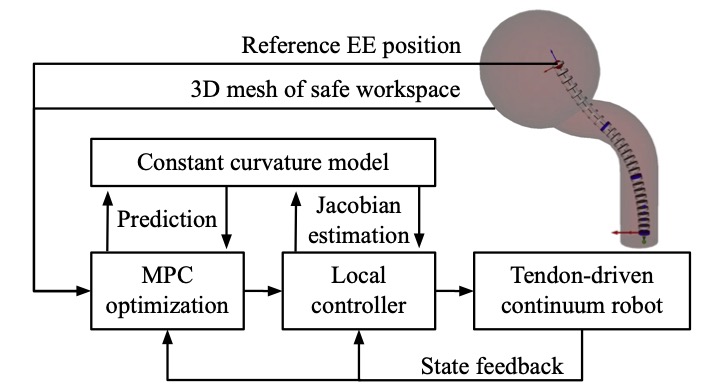
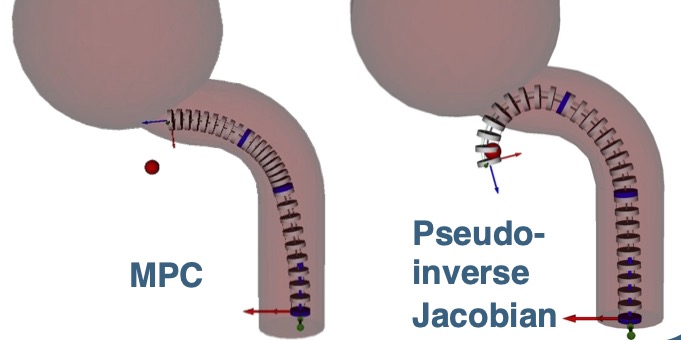
A Non-Linear Model Predictive Task-Space Controller Satisfying Shape Constraints for Tendon-Driven Continuum Robots
Maximilian Hachen, Chengnan Shentu, Sven Lilge, Jessica Burgner-Kahrs
IEEE Robotics and Automation Letters, 10(3):2438-2445, 2025.
A Non-Linear Model Predictive Task-Space Controller Satisfying Shape Constraints for Tendon-Driven Continuum Robots
Maximilian Hachen, Chengnan Shentu, Sven Lilge, Jessica Burgner-Kahrs
IEEE International Conference on Robotics and Automation, Late Breaking News Poster, 2024.
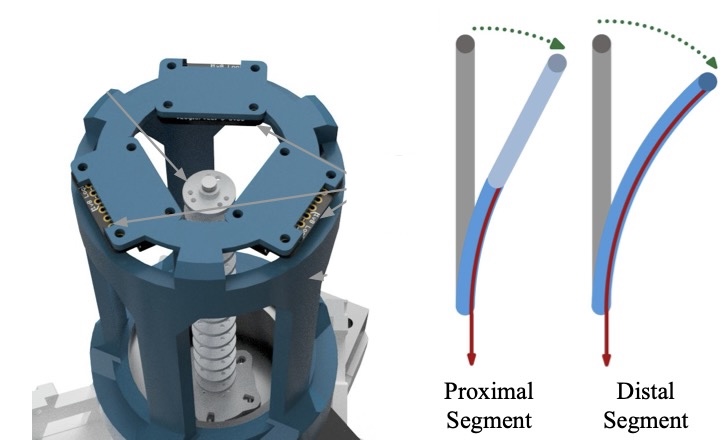
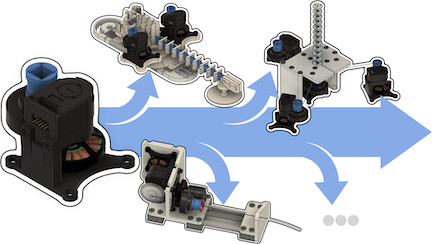
Open Continuum Robotics - One Actuation Module to Create them All
Reinhard M. Grassmann, Chengnan Shentu, Taqi Hamoda, Puspita Triana Dewi, Jessica Burgner-Kahrs
Frontiers in Robotics and AI, 11, 2024.
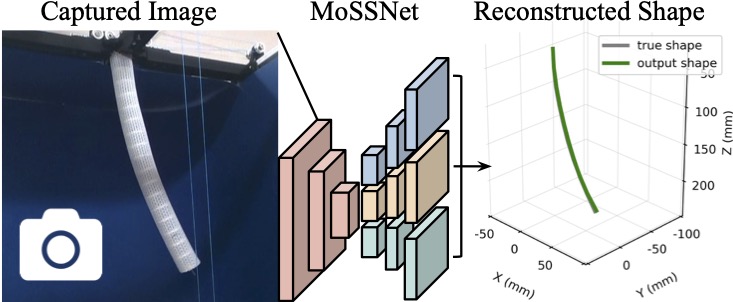
MoSS - Monocular Shape Sensing for Continuum Robots.
Chengnan Shentu, Enxu Li, Chaojun Chen, Puspita Triana Dewi, David B. Lindell, Jessica Burgner-Kahrs
IEEE Robotics and Automation Letters, 9(2):1524 - 1531, 2024.
Universal-jointed Tendon-driven Continuum Robot - Design, Kinematic Modeling, and Locomotion in Narrow Tubes
Chengnan Shentu, Jessica Burgner-Kahrs
40th Anniversary of the IEEE International Conference on Robotics and Automation, 2024.