Priyanka Rao is a Ph.D. Candidate in Mechanical & Industrial Engineering. Her research interests are continuum robots with magnetic actuation, design optimization, as well as motion planning.
Before joining CRL in September 2019, Priyanka obtained her dual degree B.Tech./M.Tech in Mechanical Engineering with specialization on Product Design from Indian Institute of Technology Madras, India in 2019. In summer 2017, Priyanka was an international visiting student funded by the German Academic Exchange Service at Leibniz University Hannover, Germany and got into contact with continuum robotics at the Laboratory for Continuum Robotics.
Publications
Computationally Efficient Lookahead Search for Contact-aided Navigation for Tendon-driven Continuum Robots
Priyanka Rao, Itai Spigelman, Oren Salzman, Jessica Burgner-Kahrs
IEEE International Conference on Soft Robotics, Late Breaking Results, 2024.
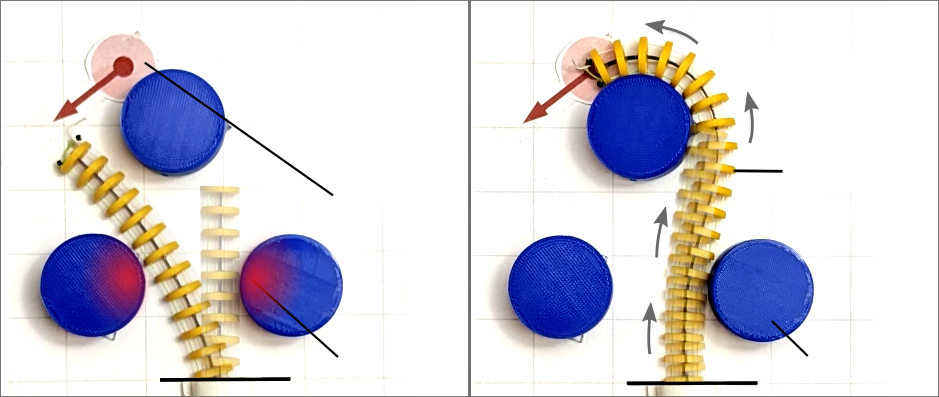
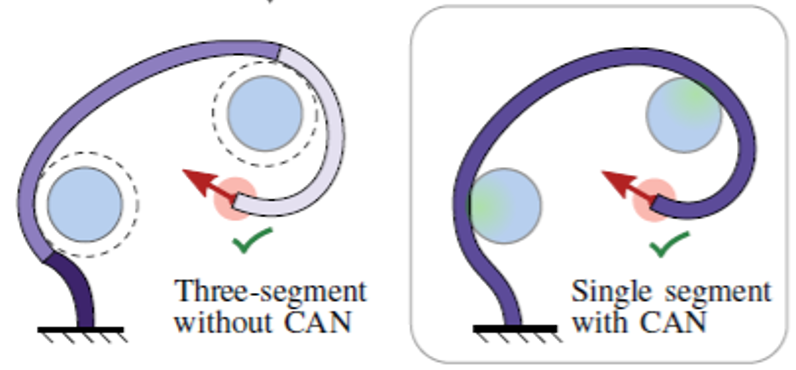
Towards Contact-Aided Motion Planning for Tendon-Driven Continuum Robots
Priyanka Rao, Oren Salzman, Jessica Burgner-Kahrs
IEEE Robotics & Automation Letters, 9(5):4687 - 4694, 2024.
A Lightweight Modular Segment Design for Tendon-Driven Continuum Robots with Pre-Programmable Stiffness
Puspita Triana Dewi, Priyanka Rao, Jessica Burgner-Kahrs
IEEE International Conference on Soft Robotics, 2024.
Tendon Driven Continuum Robots - Modeling and Motion Planning for Contact Aided Navigation and Shape Locking
Priyanka Rao
PhD Thesis, University of Toronto, 2024.
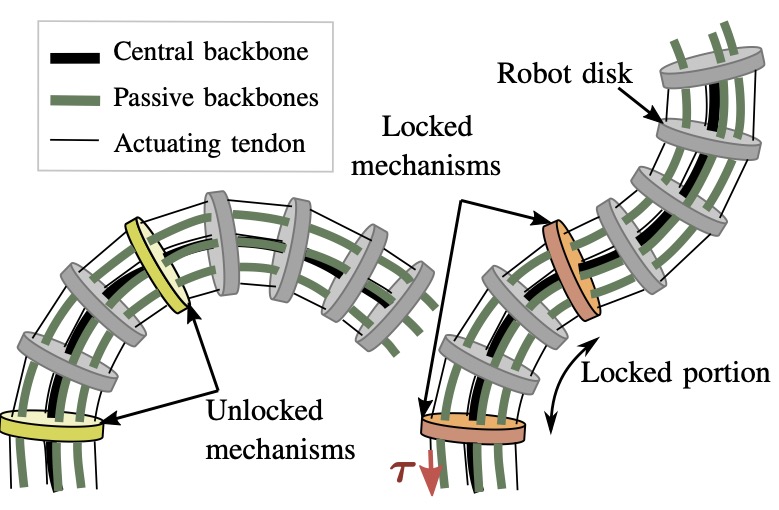
Modeling and Analysis of Tendon-driven Continuum Robots for Rod-based Locking
Priyanka Rao, Chloe Pogue, Quentin Peyron, Eric D. Diller, Jessica Burgner-Kahrs
IEEE Robotics and Automation Letters, 8(6):3126-3133, 2023.
Multiple Curvatures in a Tendon-Driven Continuum Robot Using a Novel Magnetic Locking Mechanism.
Chloe Pogue, Priyanka Rao, Quentin Peyron, Jongwoo Kim, Jessica Burgner-Kahrs, Eric D. Diller
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022.
FAS - A Fully Actuated Segment for Tendon-Driven Continuum Robots
Reinhard Grassmann, Priyanka Rao, Quentin Peyron, Jessica Burgner-Kahrs
Frontiers in Robotics and AI, 9:873446 (19 pages), 2022.
Shape Representation and Modeling of Tendon-Driven Continuum Robots Using Euler Arc Splines
Priyanka Rao, Quentin Peyron, Jessica Burgner-Kahrs
IEEE Robotics and Automation Letters, 7 (3), pp. 8114 - 8121, 2022.
Using Euler Curves to Model Continuum Robots
Priyanka Rao, Quentin Peyron, Jessica Burgner-Kahrs
IEEE International Conference on Robotics and Automation (ICRA), 2021.
How to Model Tendon-Driven Continuum Robots and Benchmark Modelling Performance
Priyanka Rao, Quentin Peyron, Sven Lilge, Jessica Burgner-Kahrs
Frontiers in Robotics and AI, 7 (630245), pp. 20, 2021.