Reinhard M. Grassmann is a Ph.D. candidate of Computer Science. His research interests are model-based and data-based
methods for continuum robot kinematics as well as motion planning and control for continuum robots.
Before joining CRL in May 2019, Reinhard was Research Assistant at the Laboratory for Continuum Robotics at Leibniz
University Hannover, Germany from April 2018 to April 2019. Reinhard obtained his B.Sc. and M.Sc. in Mechatronics
from Leibniz University Hannover, Germany in 2016 and 2018 respectively.
Publications
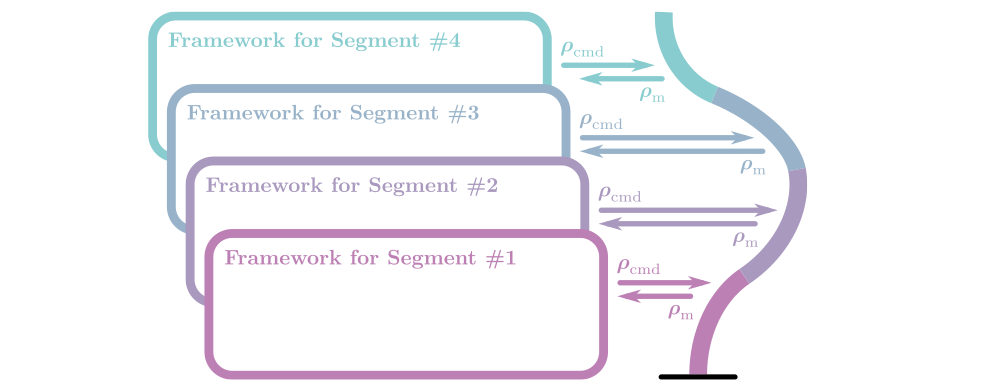
Using Clarke Transform to Create a Framework on the Manifold: From Sampling via Trajectory Generation to Control
Reinhard Grassmann, Jessica Burgner-Kahrs
IEEE-RAS International Conference on Soft Robotics (accepted), 2026.
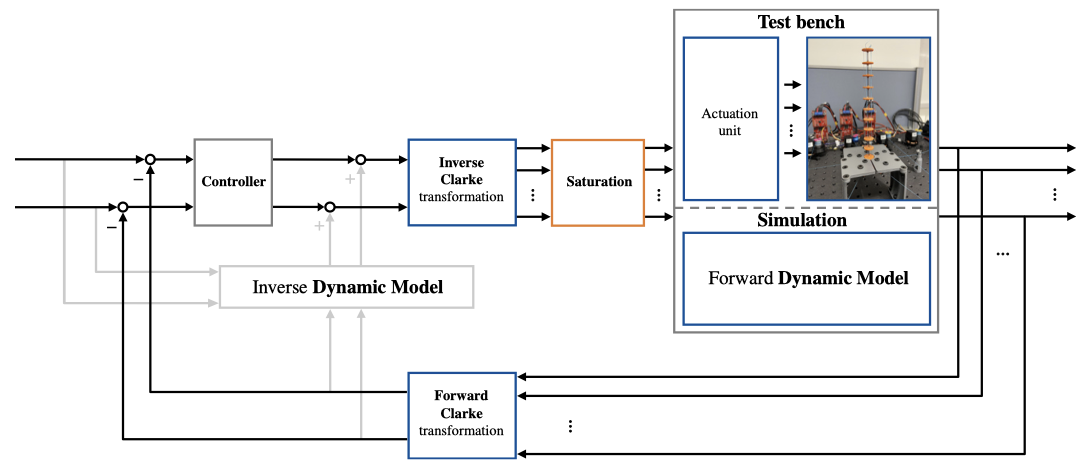
Toward Dynamic Control of Tendon-Driven Continuum Robots using Clarke Transform
Christian Muhmann, Reinhard M. Grassmann, Max Bartholdt, Jessica Burgner-Kahrs
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2025.
Towards Open Continuum Robotics
Reinhard Grassmann
PhD Thesis, University of Toronto, 2025.
Clarke Coordinates are Generalized Improved State Parametrization for Continuum Robots
Reinhard M. Grassmann, Jessica Burgner-Kahrs
IEEE Robotics and Automation Letters, 10(10):10362-10369, 2025.
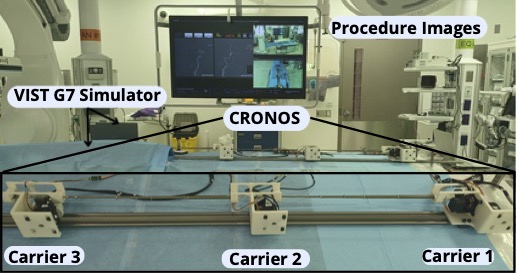
CRONOS: A Continuum Robot for Neurovascular Surgery - Design, Development, and Feasibility Evaluation
Thais Baena Moura, Arturo Consoli, Reinhard M. Grassmann, Greta Zogaj, Nicole Cancelliere, Jessica Burgner-Kahrs, Vitor Mendes Pereira
Journal of Medical Robotics Research, 10(03n04):2550010, 2025.
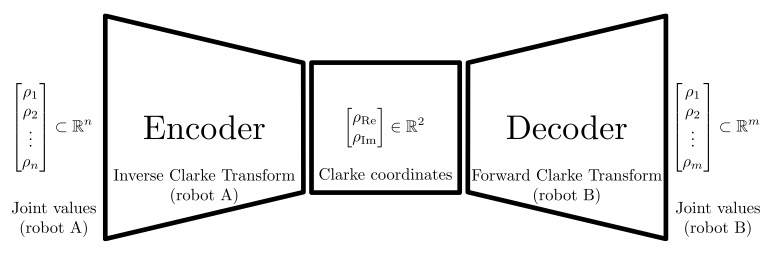
Clarke Transform and Encoder-Decoder Architecture for Arbitrary Joints Locations in Displacement-Actuated Continuum Robots
Reinhard M. Grassmann, Jessica Burgner-Kahrs
IEEE International Conference on Soft Robotics, 2025.
Using Clarke Transform to Create a Framework on the Manifold: From Sampling via Trajectory Generation to Control
Reinhard M. Grassmann, Anastasiia Senyk, Jessica Burgner-Kahrs
arXiv preprint arXiv:2412.16422, 2024.
Clarke Transform and Clarke Coordinates - A New Kid on the Block for State Representation of Continuum Robots
Reinhard M. Grassmann, Jessica Burgner-Kahrs
40th Anniversary of the IEEE International Conference on Robotics and Automation, 2024.
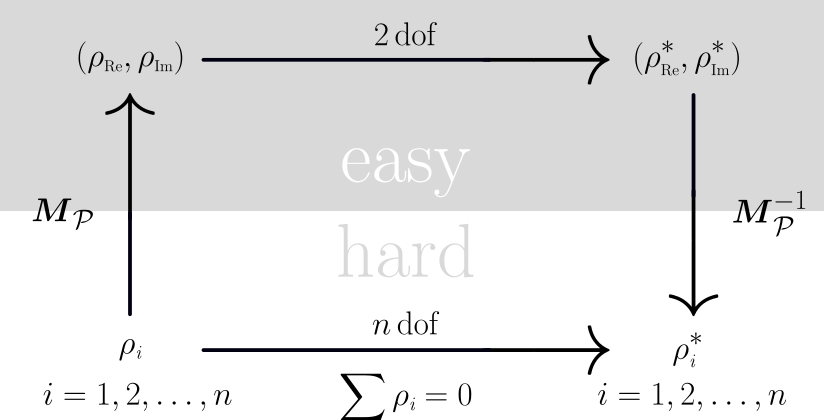
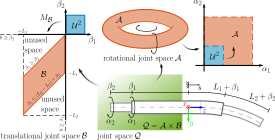
Actuation Constraints in Continuum Robotics Revisited - 2 Dof Manifold and Clarke Transform
Reinhard M. Grassmann, Anastasiia Senyk, Jessica Burgner-Kahrs
IEEE International Conference on Robotics and Automation, Late Breaking News Poster, 2024.
On the Disentanglement of Tube Inequalities in Concentric Tube Continuum Robots
Reinhard M. Grassmann, Anastassiia Senyk, Jessica Burgner-Kahrs
IEEE International Conference on Robotics and Automation, pp. 8166-8172, 2024.
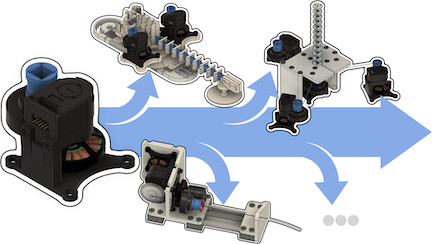
Open Continuum Robotics - One Actuation Module to Create them All
Reinhard M. Grassmann, Chengnan Shentu, Taqi Hamoda, Puspita Triana Dewi, Jessica Burgner-Kahrs
Frontiers in Robotics and AI, 11, 2024.
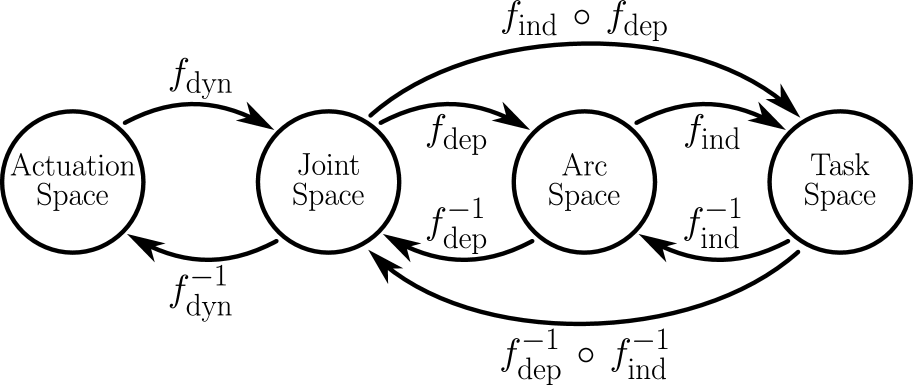
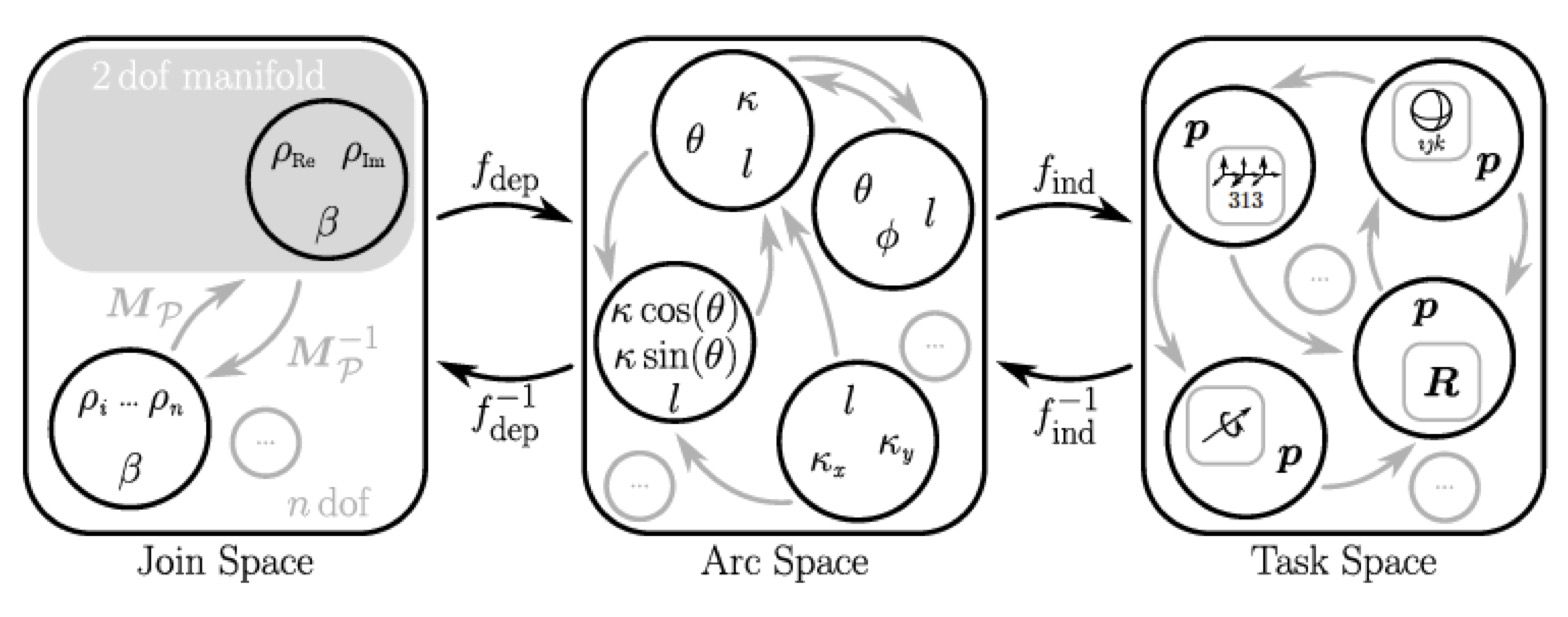
Clarke Transform - A Fundamental Tool for Continuum Robotics
Reinhard M. Grassmann, Anastasiia Senyk, Jessica Burgner-Kahrs
arXiv preprint arXiv:2409.16501, 2024.
A Dataset and Benchmark for Learning the Kinematics of Concentric Tube Continuum Robots
Reinhard M. Grassmann, Ryan Z. Chen, Nan Liang, Jessica Burgner-Kahrs
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022.
A Dataset and Benchmark for Learning the Kinematics of Concentric Tube Continuum Robots
Reinhard M. Grassmann, Ryan Z. Chen, Nan Liang, Jessica Burgner-Kahrs
Workshop on Learning from Diverse, Offline Data (L-DOD), Robotics - Science & Systems, 2022.
FAS - A Fully Actuated Segment for Tendon-Driven Continuum Robots
Reinhard Grassmann, Priyanka Rao, Quentin Peyron, Jessica Burgner-Kahrs
Frontiers in Robotics and AI, 9:873446 (19 pages), 2022.
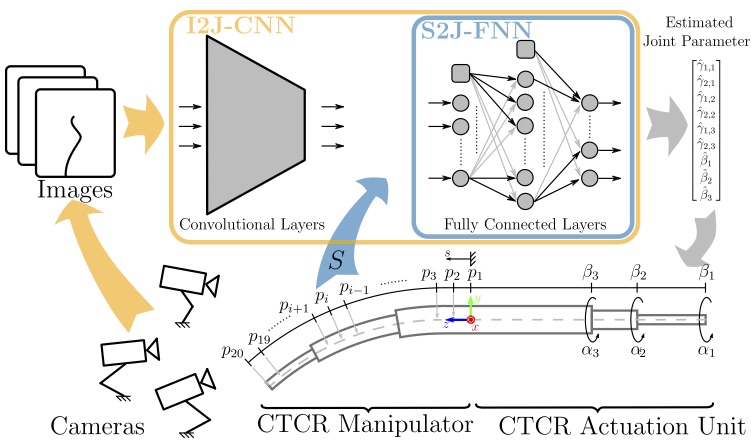
Learning-based Inverse Kinematics from Shape as Input for Concentric Tube Continuum Robots
Nan Liang, Reinhard M Grassmann, Jessica Burgner-Kahrs
IEEE International Conference on Robotics and Automation (ICRA), 2021.
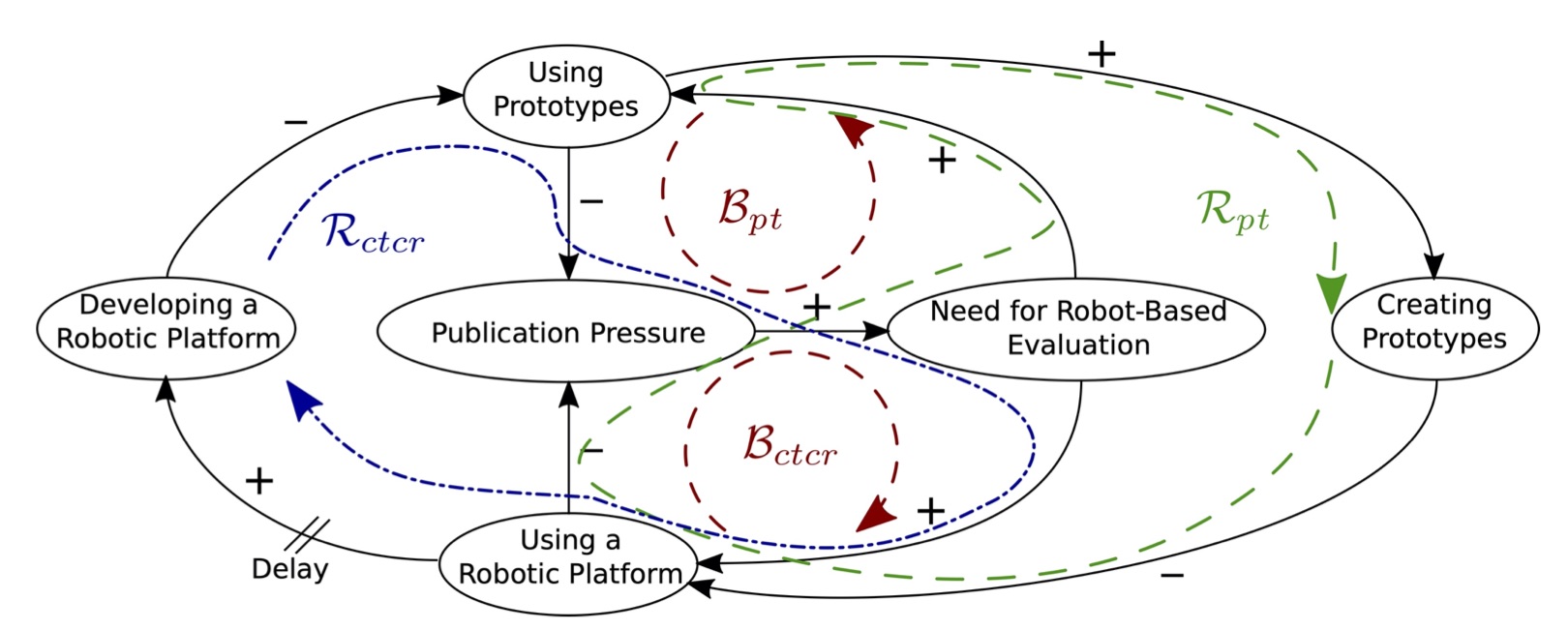
CTCR Prototype Development - An Obstacle in the Research Community?
Reinhard Grassmann, Sven Lilge, Phuong Le, Jessica Burgner-Kahrs
RSS 2020 Workshop RobRetro, 2020.
Smooth Orientation Trajectory Generator Respecting Kinematic Limits
Reinhard Grassmann, Jessica Burgner-Kahrs
IEEE-RAS International Conference on Humanoid Robots, 2019.
Quaternion-Based Smooth Trajectory Generator for Via Poses in SE(3) Considering Kinematic Limits in Cartesian Space
Reinhard Grassmann, Jessica Burgner-Kahrs
IEEE Robotics and Automation Letters, 4 (4), pp. 4192–4199, 2019.
On the Merits of Joint Space and Orientation Representations in Learning the Forward Kinematics in SE(3)
Reinhard Grassmann, Jessica Burgner-Kahrs
Robotics - Science and Systems Conference, 10 pages, 2019.
Learning the Forward and Inverse Kinematics of a 6-DOF Concentric-Tube Continuum Robot in SE(3)
Reinhard Grassmann, Vincent Modes, Jessica Burgner-Kahrs
IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 5125-5132, 2018.