Spencer Teetaert

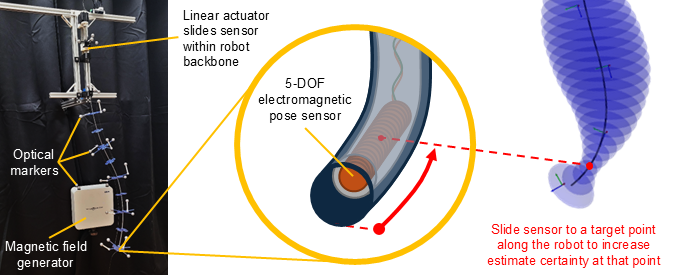
Spencer Teetaert is a Ph.D. student co-supervised between the Autonomous Space Robotics Lab and the Continuum Robotics Lab. His research interest focuses on state estimation and localisation for continuum robots, particularly in situations where contact with the environment is expected.
Spencer has a B.A.Sc. in Engineering Science with a major in robotics from the University of Toronto. His undergraduate these was on the design of learning-based controllers for parallel continuum robots. Before his work in continuum robotics, Spencer did research at the Dynamic Systems Lab at the University of Toronto where he focused on development of cheap and accessible sim2real drone development platforms for research and educational purposes.
Awards
2025-2026 Queen Elizabeth II Graduate Scholarship in Science & Technology
2024-2025 Ontario Graduate Scholarship
Publications

Robotics: Science and Systems (accepted), arXiv preprint arXiv:2602.07209, 2026.
IEEE International Conference on Soft Robotics, extended abstract, 2026.


arXiv preprint arXiv:2510.01381, 2025.
40th Anniversary of the IEEE International Conference on Robotics and Automation, 2024.