CRL @RoboSoft 2025
We just returned from the 2025 IEEE - RAS International Conference on Soft Robotics in Lausanne, Switzerland.
The first day was devoted to a fantastic line-up of workshops. CRL contributed to two:
- Jessica presented on Leveraging Environmental Interaction to the workshop audience of Bridging Computational Disciplines for Motion Generation in Soft Robotics and Deformable Systems
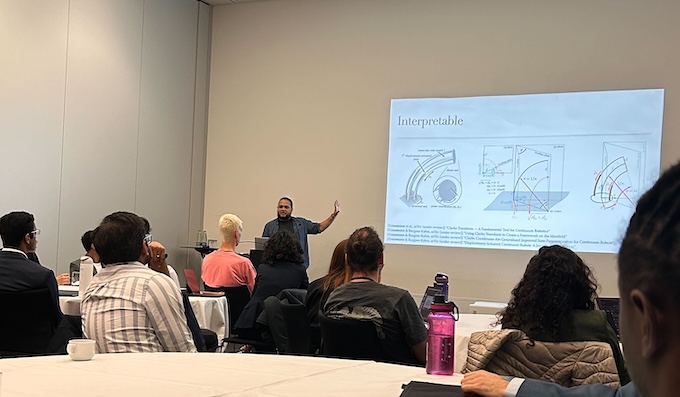
- Reinhard presented on Clarke Transform: A Lingua Franca for Continuum Robotics to the workshop audience Benchmarking in Soft Robots
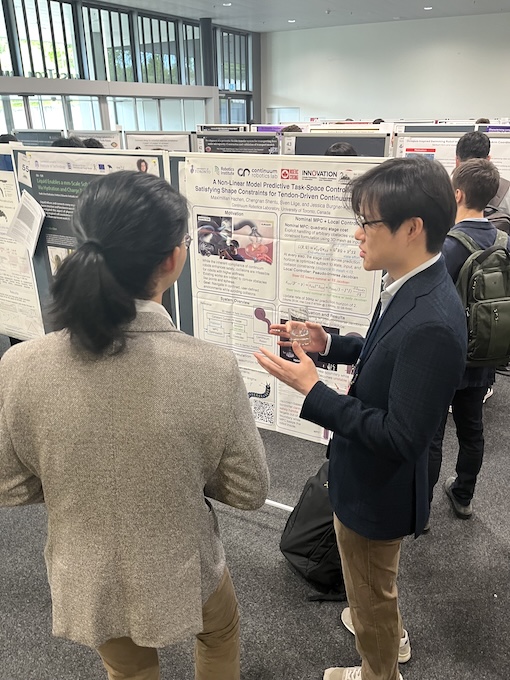
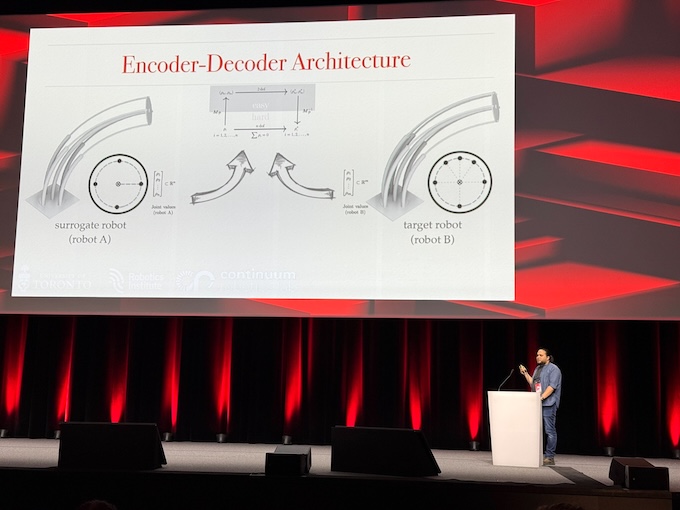
The following days were an exciting mix of plenary talks, keynotes, regular sessions and interactive presentations. Puspita, Chloe, Reinhard, and Jimmy each presented their research to an engaged audience and discussed the current state of soft robotics research in interactive sessions:
- Puspita Triana Dewi, Chloe Pogue, Jessica Burgner-Kahrs: Parametric Design of a Tendon-Driven Continuum Robot for Industrial Applications
- Maximilian Hachen, Chengnan (Jimmy) Shentu, Sven Lilge, Jessica Burgner-Kahrs: A Non-Linear Model Predictive Task-Space Controller Satisfying Shape Constraints for Tendon-Driven Continuum Robots
- Chloe Pogue, Sven Lilge, Eric Diller, Jessica Burgner-Kahrs: Improving Continuum Robots’ Stiffness through Joining
- Reinhard M. Grassmann, Jessica Burgner-Kahrs: Clarke Transform and Encoder-Decoder Architecture for Arbitrary Joints Locations in Displacement-Actuated Continuum Robots