CRL @ICRA 2025
We’re back from the 2025 IEEE International Conference on Robotics and Automation (ICRA) in Atlanta! From packed poster sessions to late-breaking research and alumni reunions, CRL had a fantastic week sharing our work, connecting with researchers from around the world, and even making time for a visit to one of the world’s largest aquariums.
The week kicked off with an engaging workshop day on Monday, where Jimmy presented his poster in the Doctoral Consortium session, titled Teaching Soft Robots Hard Tasks: Towards Physical and Visuomotor Intelligence for Tendon-Driven Continuum Robots.
From Tuesday to Thursday, ICRA 2025 featured an overwhelming (in the best way!) mix of plenary talks, keynotes, regular sessions, exhibitions, and competitions. The CRL team took part in the excitement, presenting their latest work and engaging in lively poster sessions with peers from around the world:
- Kyum Lee, Chengnan Shentu, Chloe Pogue, Jessica Burgner-Kahrs: Automating Tension Calibration for Tendon-Driven Continuum Robots: A Low-Cost Approach towards Consistent Teleoperation
- Priyanka Rao, Oren Salzmann, Jessica Burgner-Kahrs: Towards Contact-Aided Motion Planning for Tendon-Driven Continuum Robots
- Sven Lilge, Timothy Barfoot, Jessica Burgner-Kahrs: State Estimation for Continuum Multi-Robot Systems on SE(3)
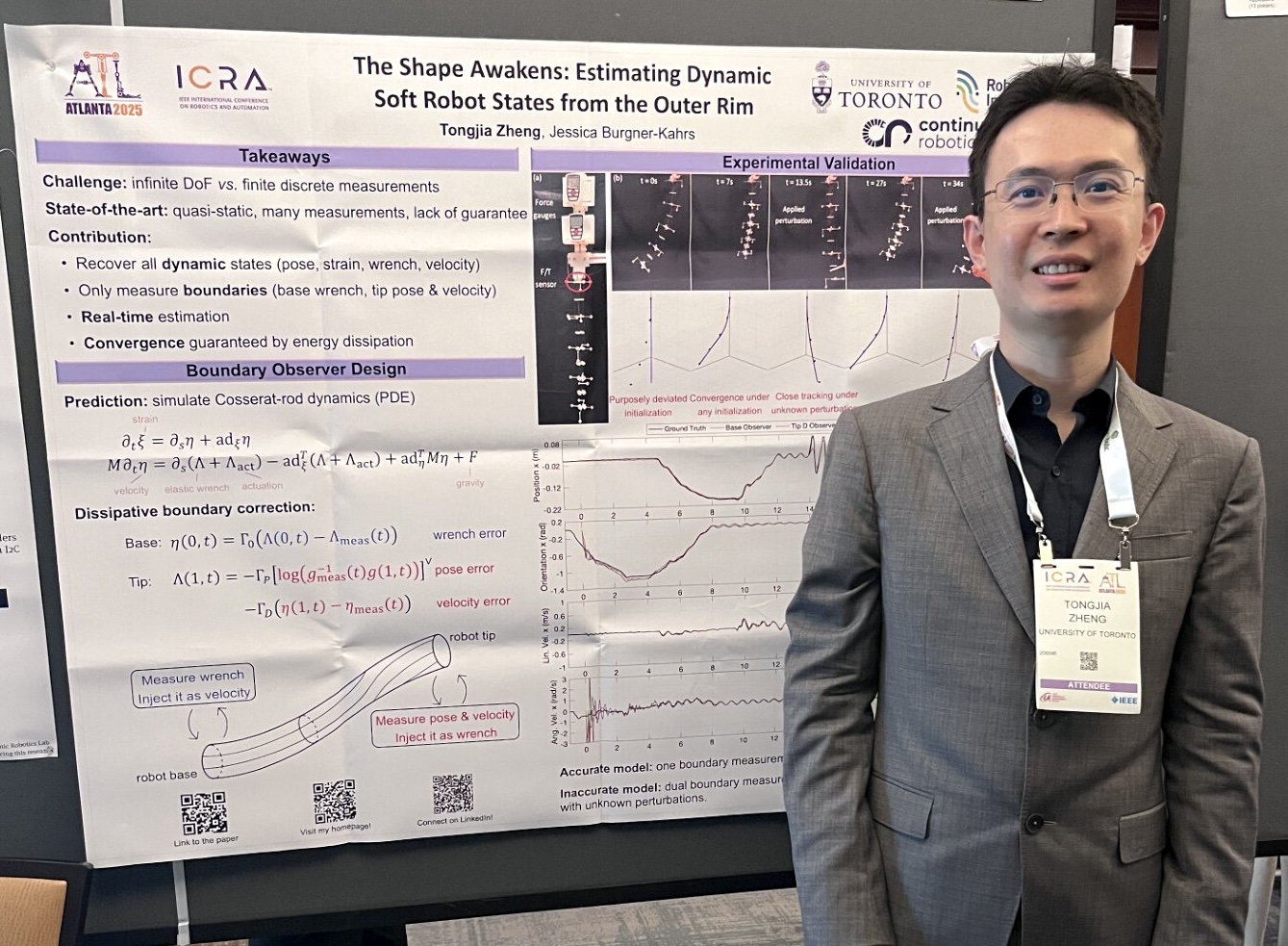
- Tongjia Zheng, Jessica Burgner-Kahrs: The Shape Awakens: Estimating Dynamic Soft Robot States from the Outer Rim
We wrapped up the week with another workshop day on Friday, where Tongjia presented his research in the Soft Robotics for Space Applications workshop.
And of course, no conference is complete without reconnecting with friends — it was a joy catching up with CRL alumni from near and far. A big thank-you to the ICRA organizers for hosting such an inspiring event, and congratulations to our team for a fantastic showing. See you at the next one!