Algorithms for Continuum Robots
This research area is concerned with the development of efficient and real-time algorithms for model computation, motion generation as well as task- and situation adaptive control of continuum robots. The inherent flexibility and many to infinite degrees of freedom are the main challenges for algorithm development.
Modeling
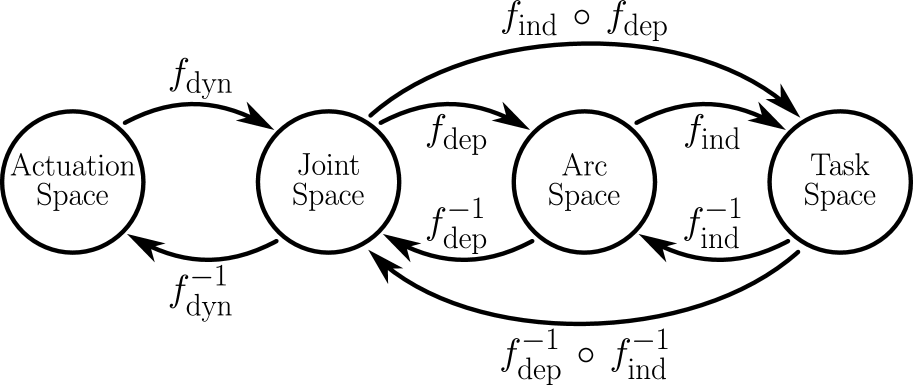
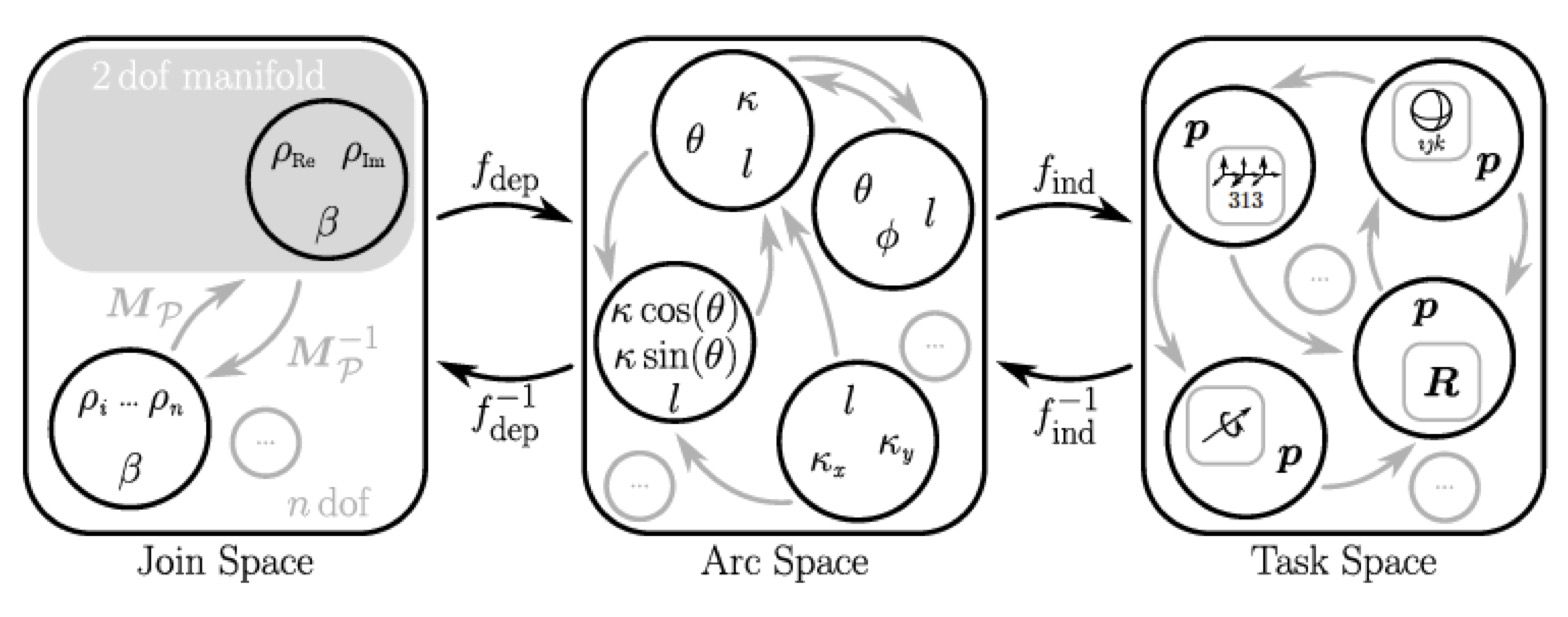
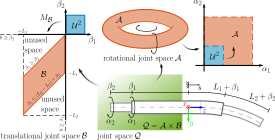
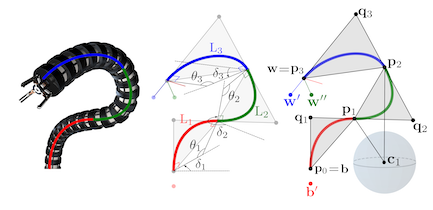
The theoretical foundation of traditional robots cannot be transferred directly to continuum robots. Thus far, there exist no general concepts for continuum robots, but methods for special cases and particular examples.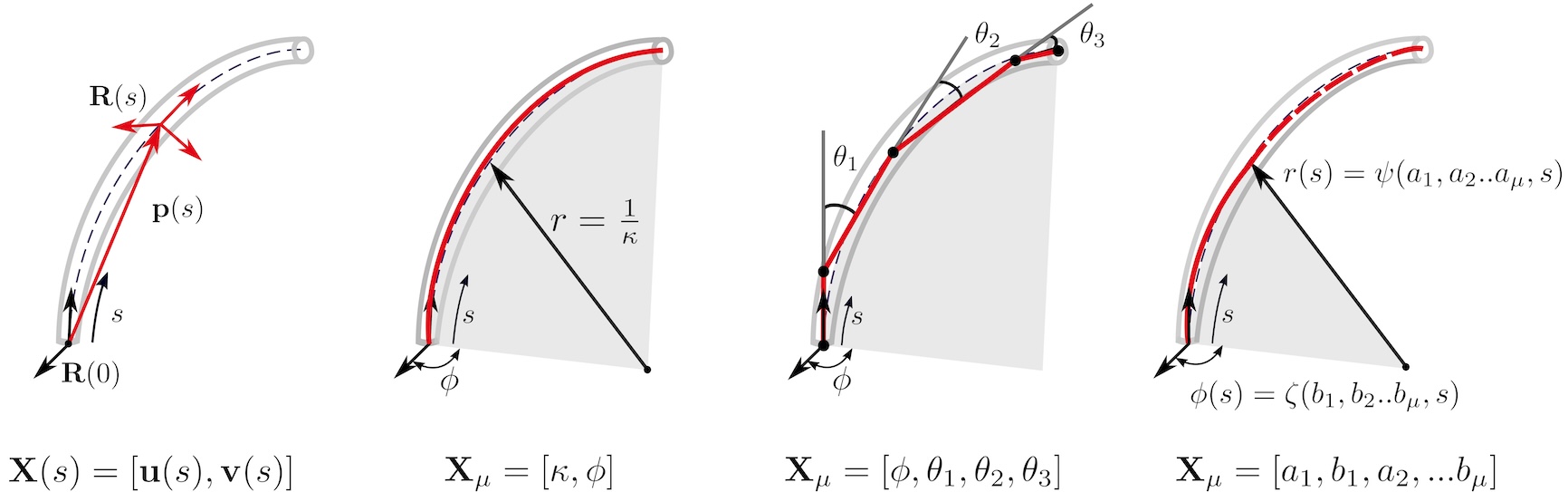
At CRL we aim at deriving fundamental methods, definitions, and characteristics for continuum robotics as they exist
in conventional robotics. To achieve this, we investigate techniques leveraging elasticity theory, differential
geometry, and optimization.
Motion Planning
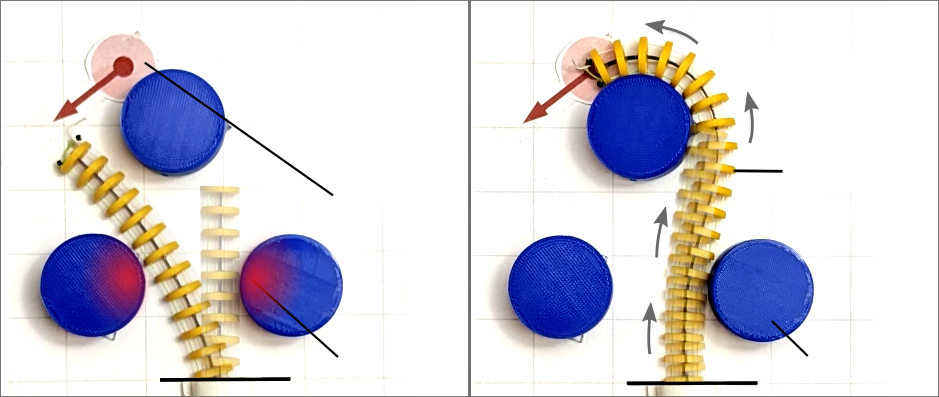
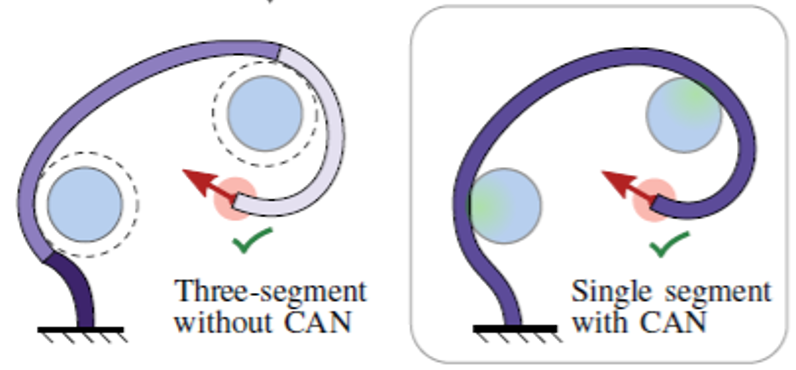
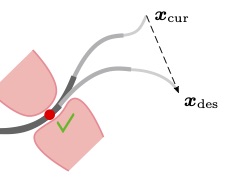
Our lab is pioneering a novel approach in the motion planning of continuum robots, shifting the paradigm from traditional obstacle avoidance to embracing obstacles. By leveraging the underactuation and utilizing the interaction of a continuum robot with its environment, we aim to enhance reachability and steering capabilities, opening new avenues in robotic manipulation and navigation.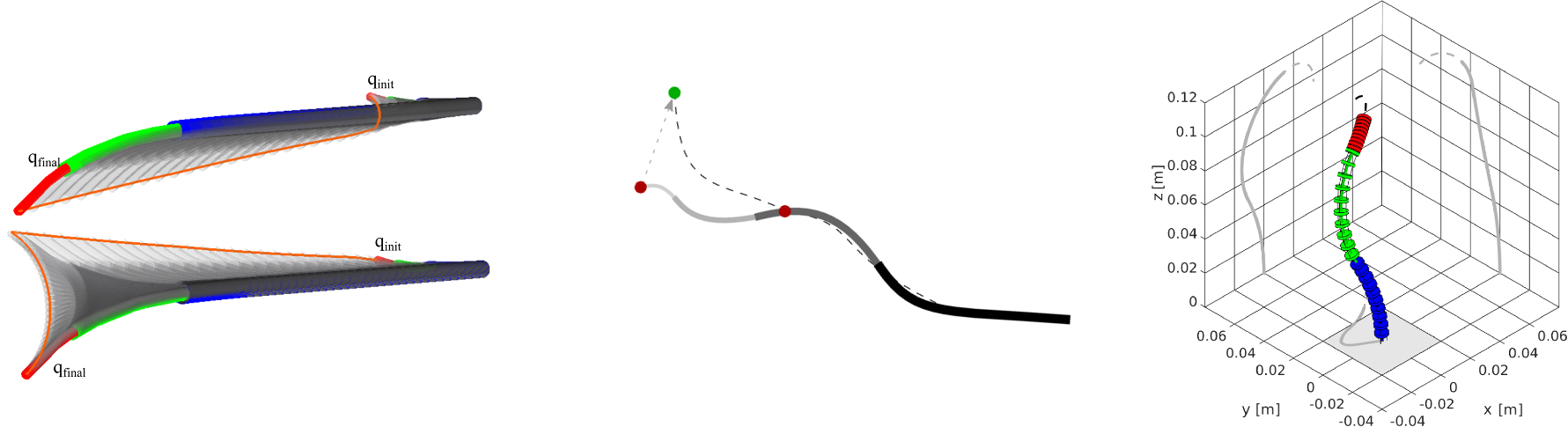
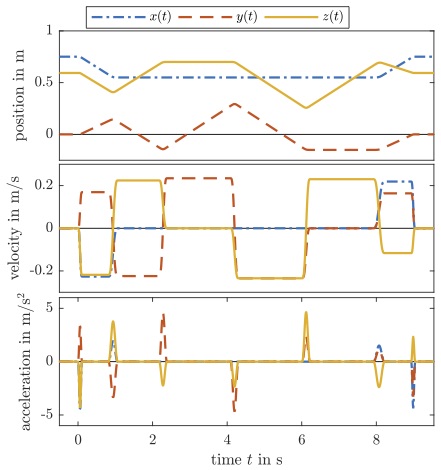
Trajectory generation and motion planning for continuum robots requires the development of scalable algorithms to
consider the degrees of freedom and underactuation. While probabilistic methods led to sufficient first results, we
are investigating motion planning algorithms which consider the morphology of continuum robots.
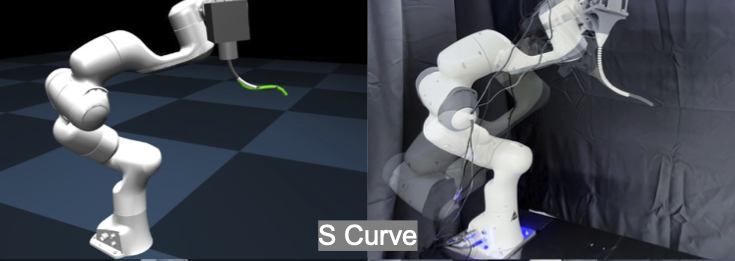
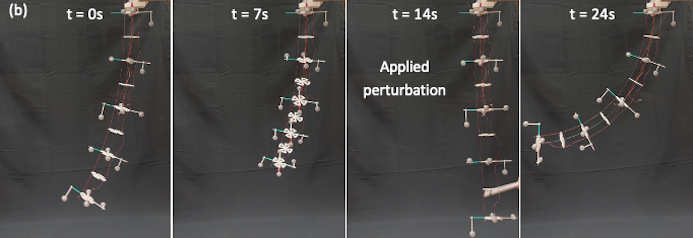
State Estimation
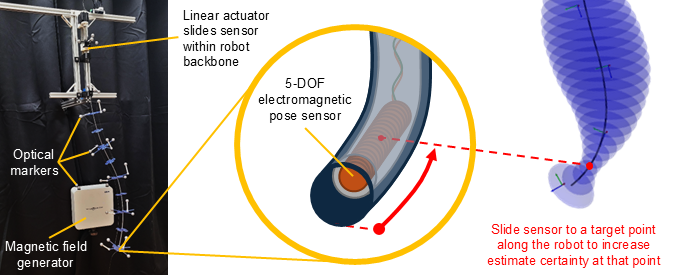
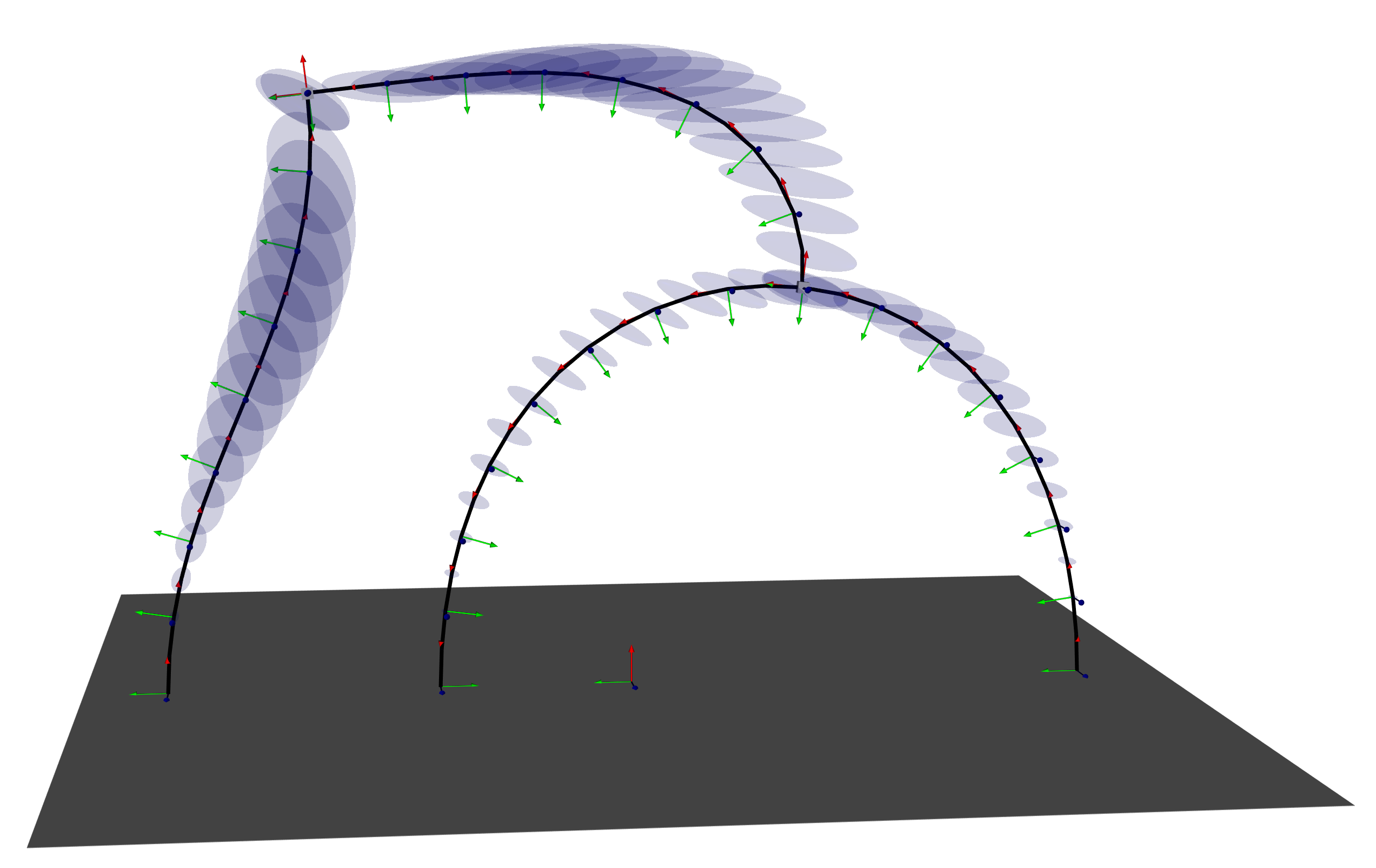
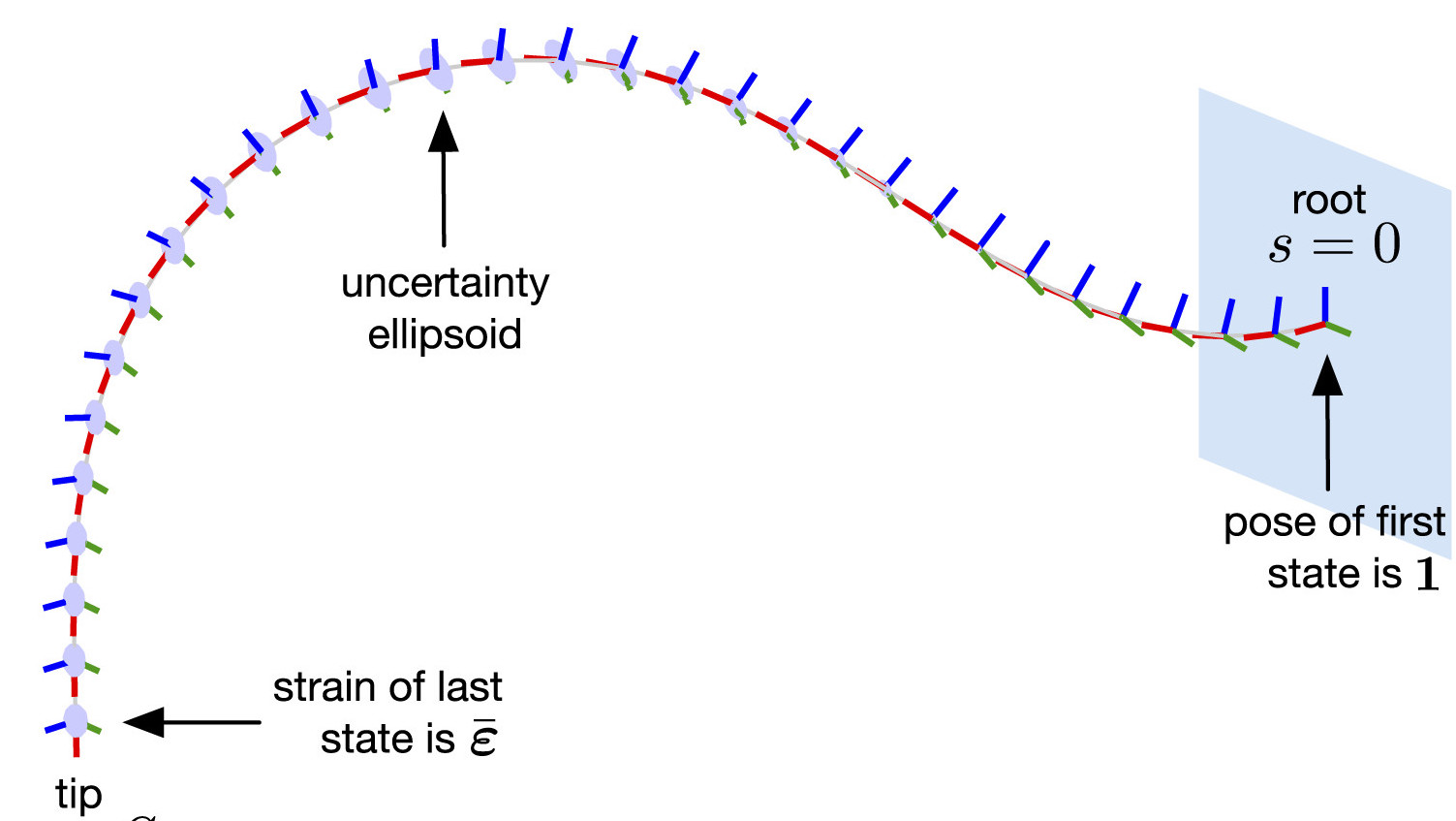
Our continuum robot state estimation work stems from a close collaboration with Dr. Tim Barfoot. Together, we found that the equations of motion commonly used in state estimation for a mobile robot trajectory which are parameterized by time, relate to those of quasi-static Cosserat rod model equations parameterized by arc length. This profound realization allowed us to repurpose a Gaussian process regression approach to state estimation, initially developed for continuous-time trajectory estimation in SE(3).Our approach to state estimation for continuum robots is to fuse a prior distribution over robot states (i.e., shape and strain from a physical model) with sensed quantities (i.e., position/pose or strain) to generate a posterior distribution over robot states. In other words, we take a probabilistic approach to estimate the most likely robot state and its uncertainty. Philosophically, we do not require the most accurate prior model since the measurements will be tremendously helpful in our task. We therefore develop and employ a simple Cosserat rod model that essentially allows us to interpolate between discrete measurements.
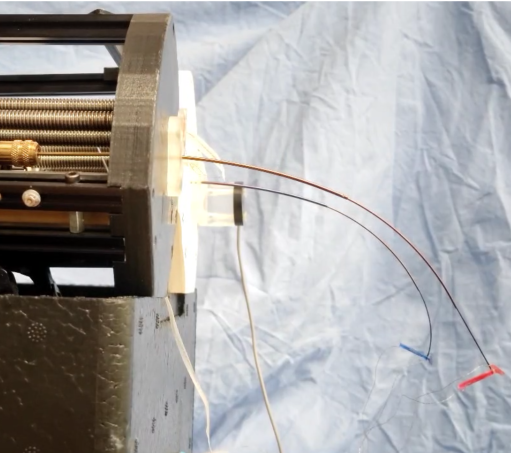
Furthermore, we are exploring approaches from simultaneous localization and mapping in the mobile robotics community and how they can be adapted and repurposed in continuum robotics. For instance, we are investigating how camera images obtained from the tip of a continuum robot can be used to gain information on the body posture of the robot within its environment. This is particularly challenging as typical industrial environments are ambiguous, with repetitive patterns and symmetries (e.g. the turbine blades within a jet engine), and as the robot's body may be temporarily and partially in contact with the environment.
Funding
- NSERC Discovery Grant RGPIN-2025-04343 (2025 - 2030)
- Deans Strategic Fund (DSF): Connecting the Bot (2020 - 2023)
- NSERC Discovery Grant RGPIN-2019-04846 (2019 - 2025)
Publications

Robotics: Science and Systems (accepted), arXiv preprint arXiv:2602.07209, 2026.
International Journal of Robotics Research (accepted), arXiv preprint arXiv:2505.04491, 2026.
IEEE International Conference on Soft Robotics, extended abstract, 2026.

IEEE International Conference on Soft Robotics, pp. 821-828, 2026.



arXiv preprint arXiv:2510.01381, 2025.
IEEE Robotics and Automation Letters, 10(10):10362-10369, 2025.
IEEE International Conference on Robotics and Automation, Late Breaking News Poster, 2024.
IEEE International Conference on Soft Robotics, Late Breaking Results, 2024.
IEEE International Conference on Robotics and Automation, pp. 8166-8172, 2024.
40th Anniversary of the IEEE International Conference on Robotics and Automation, 2024.
arXiv preprint arXiv:2409.16501, 2024.
40th Anniversary of the IEEE International Conference on Robotics and Automation, 2024.
The International Journal of Robotics Research, 41(13-14):1099-1120, 2022.
International Conference on Manipulation, Automation and Robotics at Small Scales, 2022.

International Journal of Robotics Research, 40 (1), pp. 7-23, 2021.
IEEE International Conference on Robotics and Automation (ICRA), 2021.
IEEE Sensors Journal, 21 (5), pp. 6712-6723, 2021.
IEEE Robotics and Automation Letters, 5 (1), pp. 103–110, 2020.
IEEE Robotics and Automation Letters, 4 (4), pp. 4192–4199, 2019.
Workshop on Open Challenges and State-of-the-Art in Control System Design and Technology Development for Surgical Robotic Systems, IEEE International Conference on Robotics and Automation, 2019.

International Conference and Exhibition on New Actuators and Drive Systems, pp. 154-164, VDE VERLAG GMBH, 2018.
IEEE Robotics & Automation Letters, 3 (3), pp. 1793-1800, 2018.
IEEE Robotics and Automation Letters, 1 (2), pp. 876–883, 2016.
IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 202-208, 2015.
IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1269–1275, 2014.
IEEE International Conference on Robotics and Automation, pp. 1193–1198, 2013.