Open Continuum Robotics Project
Right now, there are a multitude of barriers that roboticists must overcome if they want to get into continuum robotics, including but not limited to: no textbook on this topic, research paper paywalls, limitations in robotic simulator capabilities, and a lack of obtainable continuum robot hardware. In the interest of promoting increased exploration in the field and thus new scientific discoveries, this project aims to solve the challenges listed above that are currently impeding prospective researchers and roboticists entering the field of continuum robotics.
The Open Continuum Robotics Project provides resources such as:
- Blog entries about entry-level content, research results, robots in action, and such
- A software simulator for continuum robot behavior
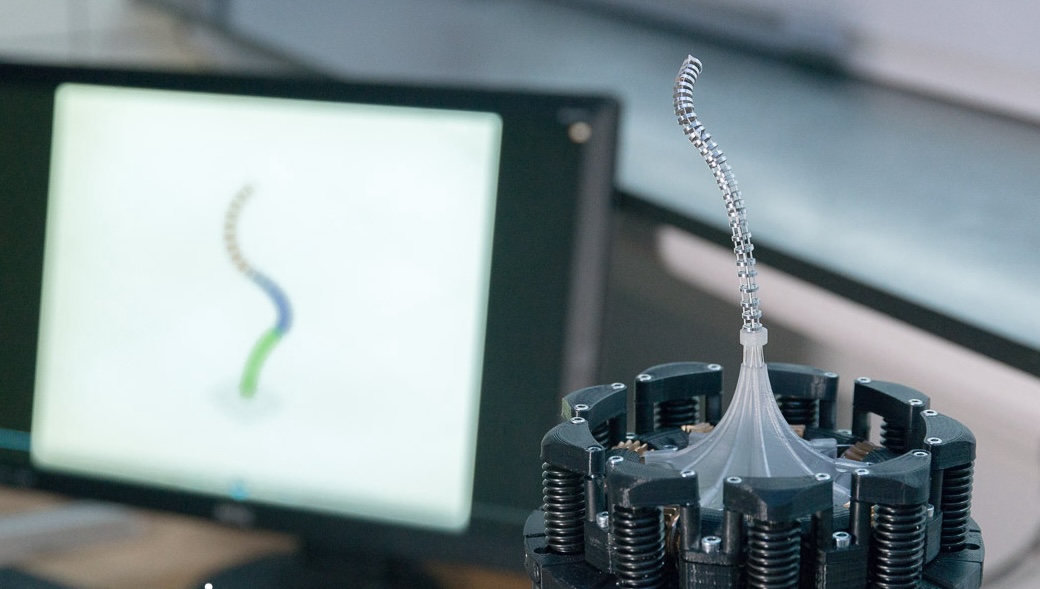
- Building your own continuum robot hardware with easily obtainable components and 3D printing
Find out more on http://opencontinuumrobotics.com