Tendon Driven Continuum Robots
TDCR Design
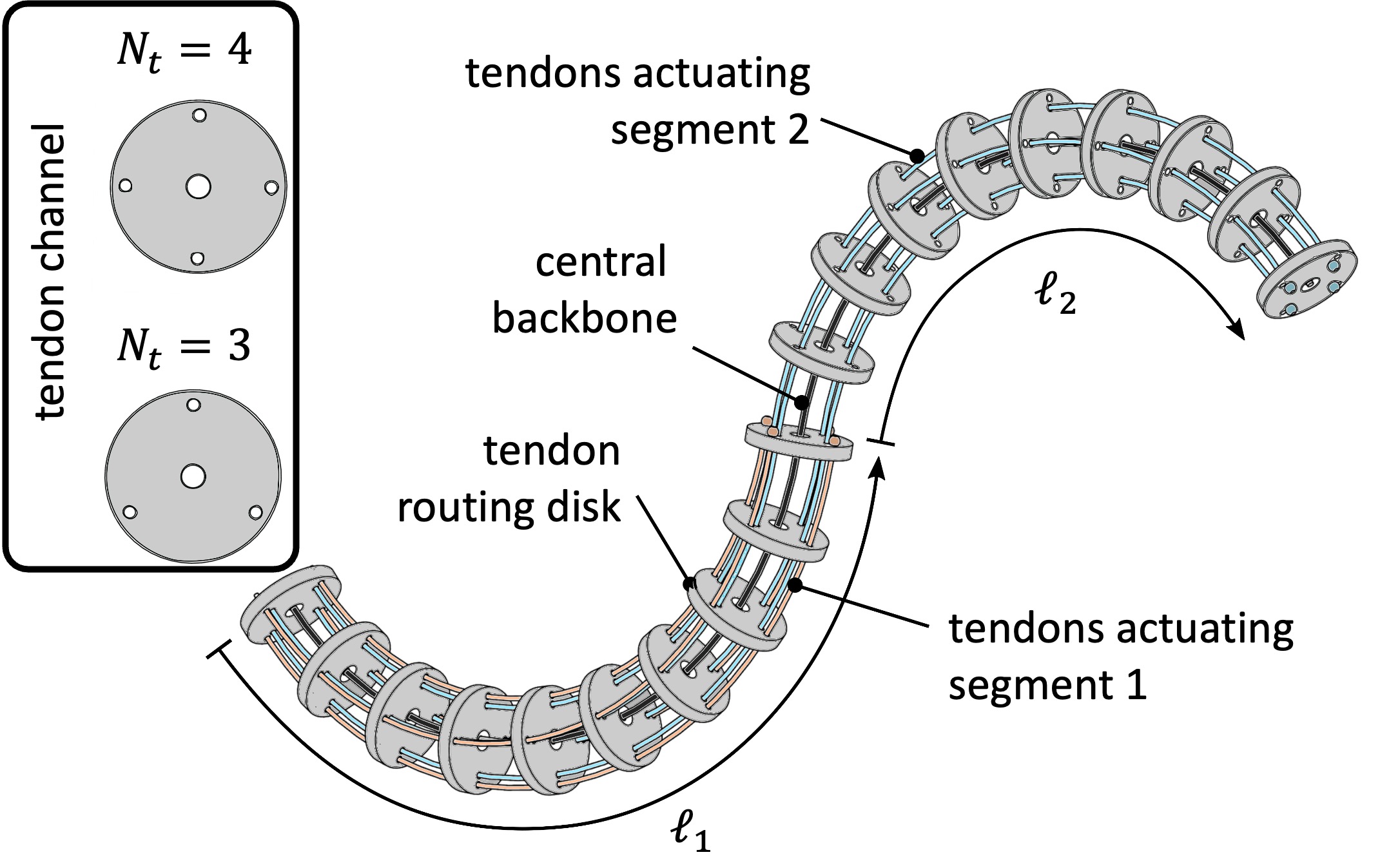
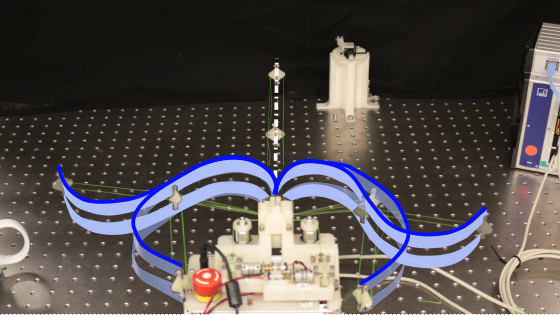
At CRL, we are at the forefront of pioneering tendon-driven continuum robots. Our designs include multi-segmented continuum robots that inherently exhibit follow-the-leader motion capabilities, a critical feature for navigating complex environments. Additionally, we are developing robotic segments capable of integrating the three fundamental motion primitives: spatial bending, twisting, and extension/contraction. This versatility enables our robots to perform a wide range of tasks with unprecedented dexterity and precision, pushing the boundaries of what is possible in the field of robotics.

Reducing Complexity through Mechanical Design and Computational Means
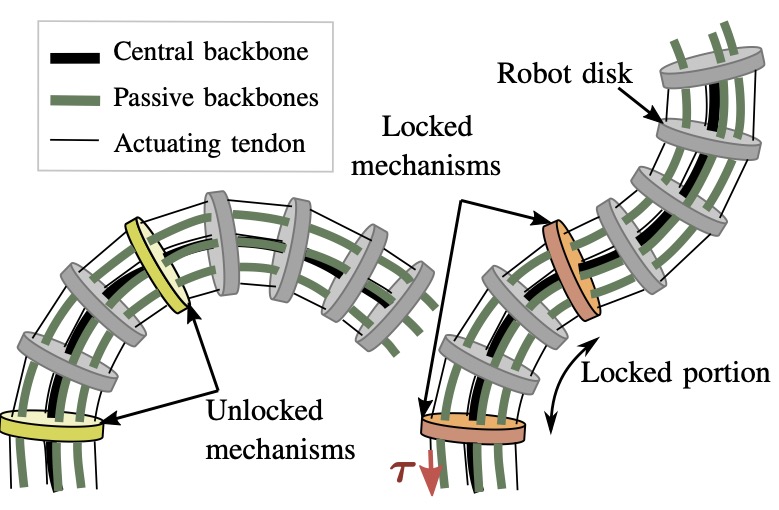
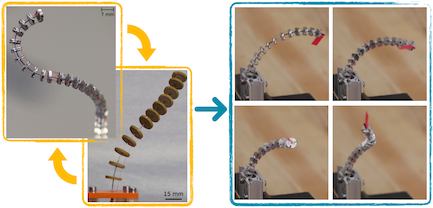
To reduce the number of actuators in multi-segmented continuum robots, we explore mechanical modifications to induce internal constraints and, consequently, curvature variation. This approach employs the principle of shape locking, where locking portions of the robot inhibits relative motion between its components. As a result, the free portion can respond to tendon actuation, while the locked portion maintains its general shape.Magnetic Locking
In collaboration with Dr. Eric Diller's lab, we proposed a magnetic locking mechanism. This work enables two curvatures in a single segment tendon-driven continuum robot. We showed that multiple of these magnetic locking mechanisms can be addressable actuated, demonstrating the potential of achieving a greater number of curvatures in a single segment.Actuation Strategies
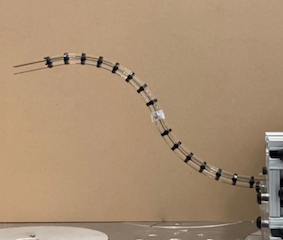
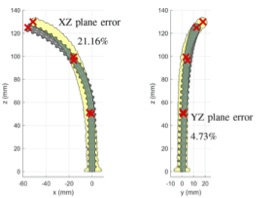
Furthermore, we address the gap in physics-based models used to predict the robots' behaviour by proposing a 3D static model that considers the length constraints of locked portions, along with backbone twist, frictional, and gravitational forces. This approach generalizes to any continuum robot, which allows to impose length constraints actively. Using this modelling approach, we explored different actuation strategies computationally. We found that three or more locking mechanisms can be used to achieve the same robot shape but with different stiffness properties.Funding
- XSeed, University of Toronto (2019-2021)
- Canada Foundation for Innovation, John R. Evans Leaders Fund
- Ontario Research Fund, Research Infrastructure
Publications

Modeling and Analysis of Tendon-driven Continuum Robots for Rod-based Locking
IEEE Robotics and Automation Letters, 8(6):3126-3133, 2023.
Stability Analysis of Tendon Driven Continuum Robots and Application to Active Softening
IEEE Transactions on Robotics, 40:85-100, 2023.
FAS - A Fully Actuated Segment for Tendon-Driven Continuum Robots
Frontiers in Robotics and AI, 9:873446 (19 pages), 2022.

Tendon-driven Continuum Robots with Extensible Sections - A Model-based Evaluation of Path Following Motions
International Journal of Robotics Research, 40 (1), pp. 7-23, 2021.

Comparison of Modeling Approaches for a Tendon Actuated Continuum Robot with Three Extensible Segments
IEEE Robotics & Automation Letters, 4 (2), pp. 989 - 996, 2019.

On the Merits of Helical Tendon Routing in Continuum Robots
IEEE International Conference on Robotics and Automation, pp. 6470–6476, 2017.

Toward Improving Path Following Motion - Hybrid Continuum Robot Design
IEEE International Conference on Robotics and Automation, pp. 4666-4672, 2017.
Considerations for follow-the-leader motion of extensible tendon-driven continuum robots
IEEE International Conference on Robotics and Automation, pp. 917–923, ISBN -- 978-1-4673-8026-3., 2016.
A Tendon-Driven Continuum Robot with Extensible Sections
IEEE/RSJ International Conference on Intelligent Robots and Systems, 2015.