Immersive Interaction
The aim of this research programme is to create continuum robot systems, operated or monitored by a human user through an immersive interface. These envisioned systems will reach the unreachable in a non-destructive, minimally-invasive manner, and perform operations and manipulate objects with unprecedented accuracy and dexterity. The research funding for this programme is instrumental to achieving this goal, as it provides infrastructure for developing and manufacturing continuum robot technology (rapid prototyping, motors, motion control boards), sensing technology (fiber Bragg grating, force/torque, electro-magnetic tracking), and devices for human-robot interaction (haptic input devices, 3D visualization).
The research will have a direct impact on service robotics, particularly in healthcare and in maintenance, repair, and operations. For instance, thanks to their small size, continuum robots will allow clinicians to practice personalized medicine, delivering better care at a lower cost.

Scientific Questions
- How can we effectively control continuum robots and leverage their embodied intelligence, while interacting with the environment?
- How can we interact with continuum robots and perceive feedback from robots, at varying levels of autonomy?
Research Pillar 1: Create Continuum Robot Systems
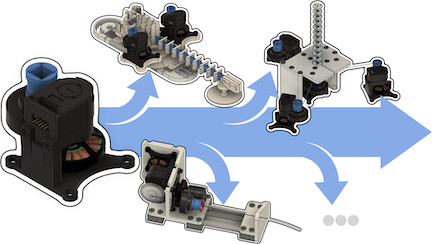
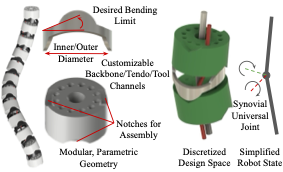
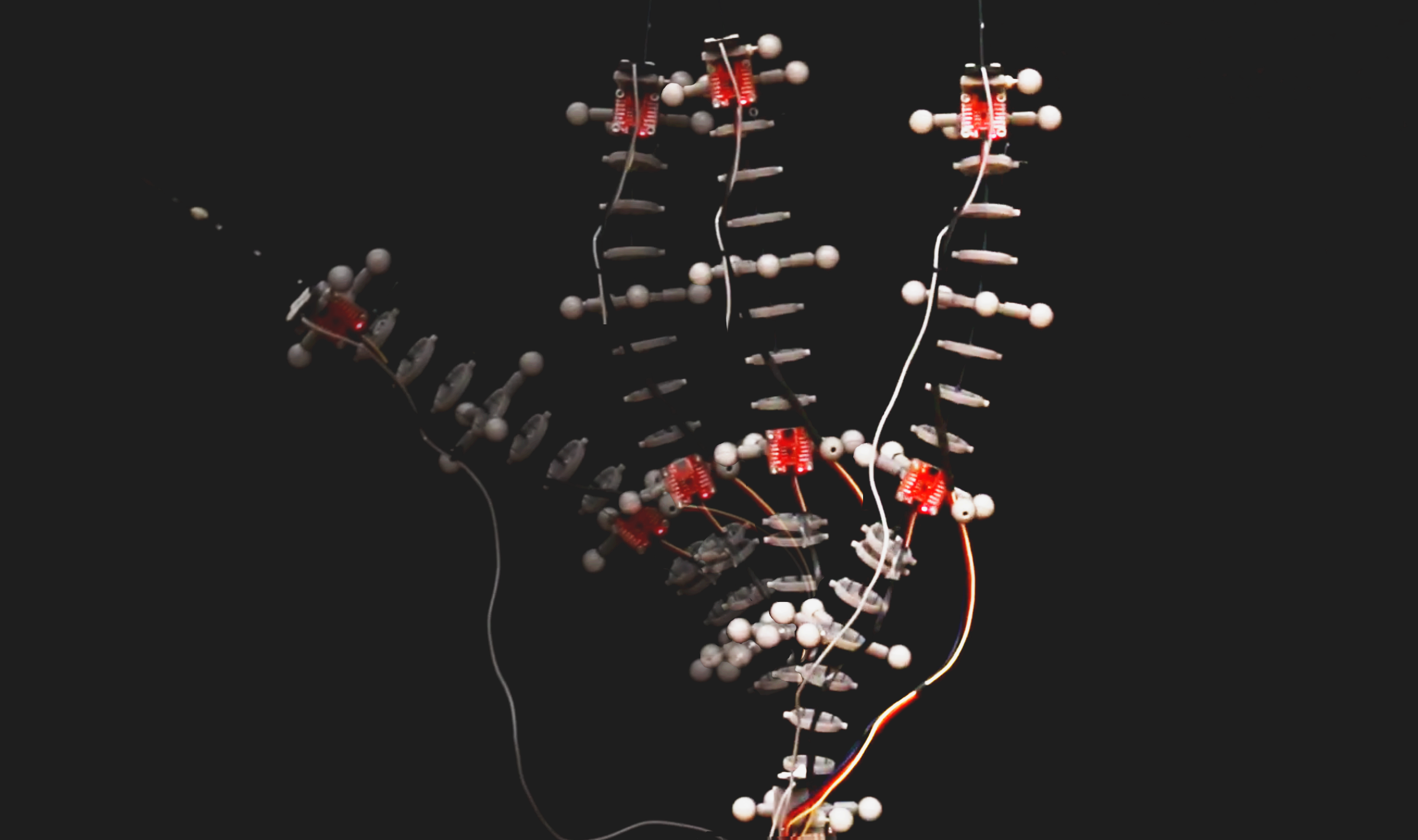
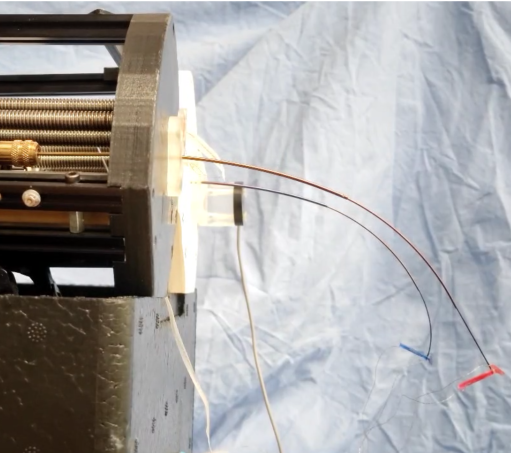
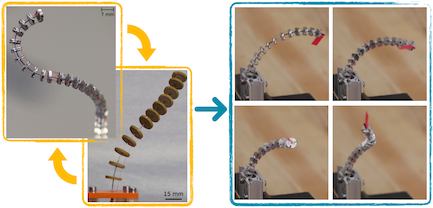
This technology development pillar aims to investigate and build systems of particularly small but long continuum robots, i.e. high diameter to length ratios, which are able to manoeuvre and manipulate in constrained and tortuous environments. The main challenge lies in the contradictory requirements of self-retainment and compliance over the full length. Based on our experience in mechatronics and preliminary results, we will conceive features such as self-stiffening through material composition, bracing components, and collaborative joining mechanisms. 3D printing from multiple materials and integration of functional parts as well as sensors are key enabling methods for the next generation of continuum robot systems and part of the requested infrastructure.
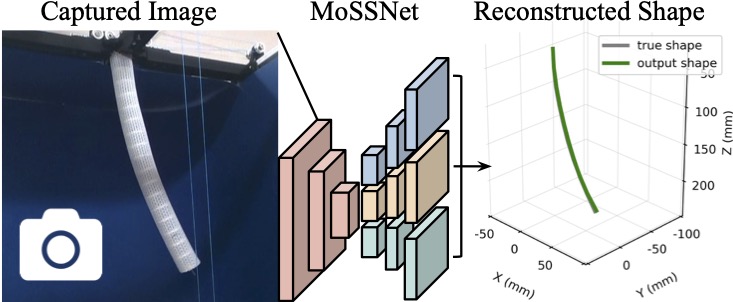
Research Pillar 2: Sense and Control Robot’s Morphology
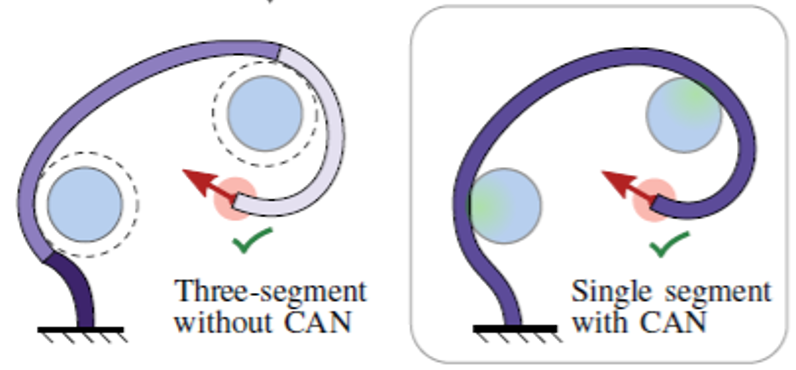
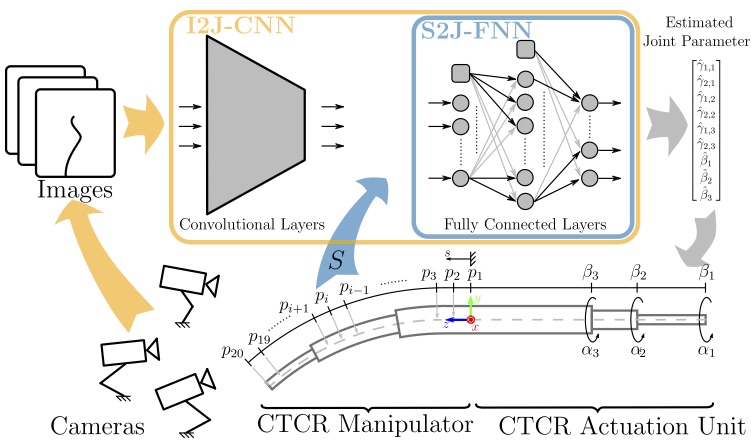
In robotics, the environment used to be conceived as “in the way,” such that any contact of the robot with anything other than the manipulated object was considered a “collision” and was to be strictly avoided. In contrast, continuum robotics research considers the environment as an important tool for achieving task goals. The environment might even be considered as part of the robot’s morphology. To enable this view of robots acting with the environment, rather than in the environment, continuum robots are designed to accommodate contact-rich interactions by relying on underactuated and inherently compliant designs. This paradigm shift necessitates the development of novel approaches to the sense-relevant aspects of the robot’s morphology that are in contact with the environment to support suitable methods for motion planning and control.
Research Pillar 3: Engage with Human Operators
Thanks to their compliance, continuum robots are inherently safe when in direct contact with or in proximity to humans. As their structure is flexible and continuously bending, with many degrees of freedom, the control input to the robot and the resulting shape cannot be mentally related by the operator. Additionally, they are anticipated to be deployed insitu, such that the operator loses direct sight of the robot. This research pillar aims to design an immersive human-robot interface for continuum robot systems to enable intuitive interaction and collaborative manipulation. To allow for different levels of autonomy, ranging from teleoperation over task autonomy to full automation, we will investigate methods to perceive, interpret, reason, and act on a situation.
Funding
- Canada Foundation for Innovation, John R. Evans Leaders Fund
- Ontario Research Fund, Research Infrastructure
Publications

40th Anniversary of the IEEE International Conference on Robotics and Automation, 2024.
International Conference on Manipulation, Automation and Robotics at Small Scales, 2022.
Frontiers in Robotics and AI, 9:873446 (19 pages), 2022.
IEEE International Conference on Robotics and Automation (ICRA), 2021.