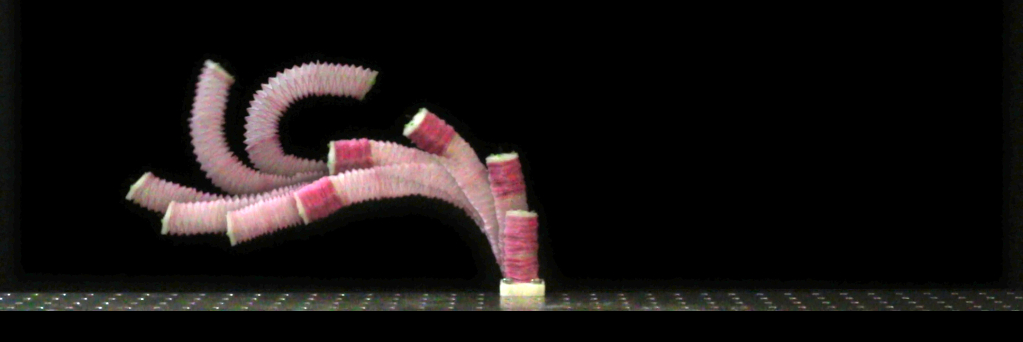
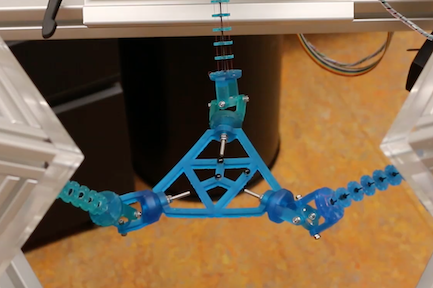
At CRL, we create innovative continuum robot designs with novel features such as drastically increased motion
capabilities through extensibility, adjustable stiffness through scale sheaths, and higher accuracy through parallel
structures.
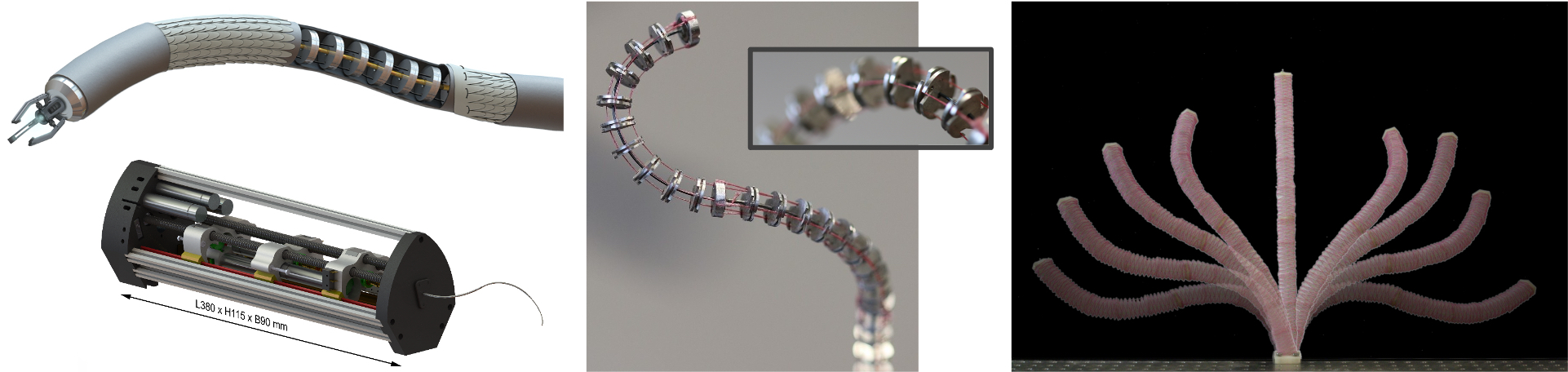
In terms of designing continuum robots a wide spectrum of compliance and elasticity can be achieved by variation of
materials, structure, actuation, etc. We aim at developing particularly small continuum robots which are able to
manoeuvre and manipulate in constrained and tortuous environments.
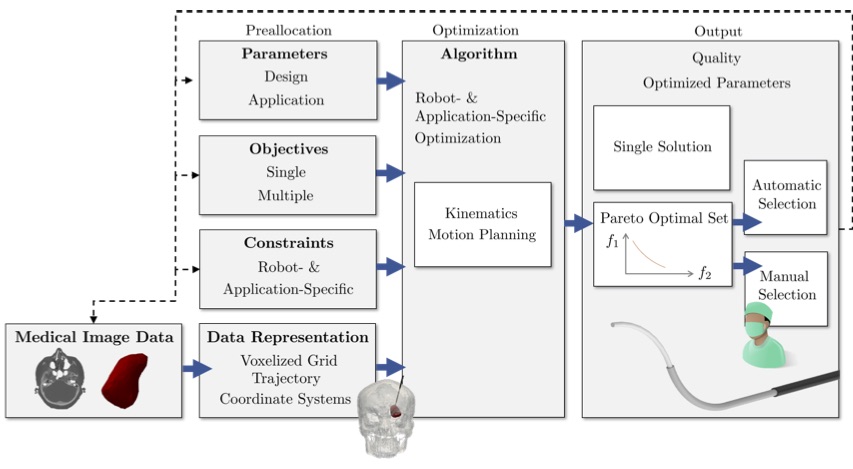
In addition to the physical design of continuum robots, research @CRL is also concerned with computational design.
For instance, we are developing evolutionary algorithms and machine learning techniques to explore the infinite
parameter space of tubular continuum robots and derive design guidelines.
Funding
- NSERC Discovery Accelerator Supplements
- Canada Foundation for Innovation, John R. Evans Leaders Fund
- Ontario Research Fund, Research Infrastructure
Publications
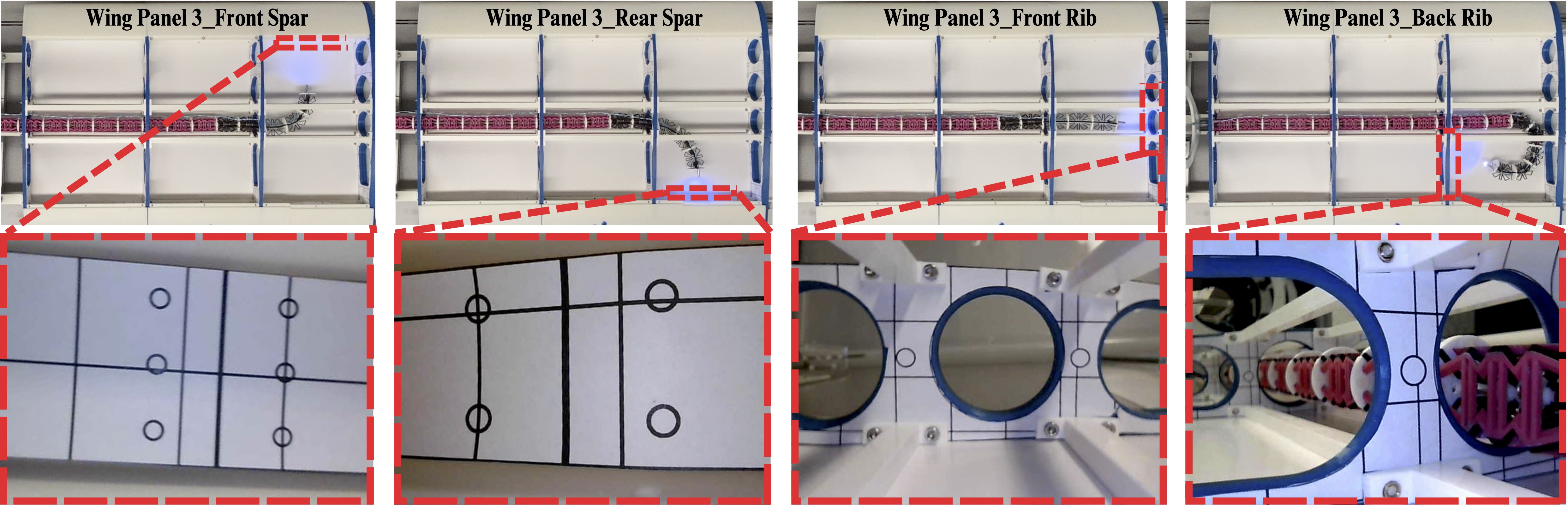
CRAFT: A 3D-printed Modular Design Framework for Task-specific Continuum Robots
Puspita Triana Dewi, Chloe Pogue, Chengnan Shentu, Andrea Gotelli, Jessica Burgner-Kahrs
Nature partner journal npj Robotics, 2026.
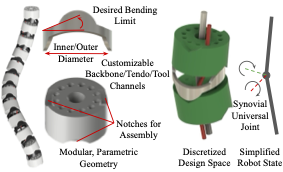
Parametric Design of a Tendon-Driven Continuum Robot for Industrial Applications
Puspita Triana Dewi, Chloe Pogue, Jessica Burgner-Kahrs
IEEE International Conference on Soft Robotics, 2025.
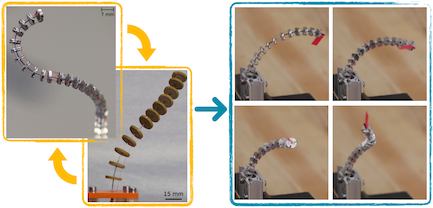
A Lightweight Modular Segment Design for Tendon-Driven Continuum Robots with Pre-Programmable Stiffness
Puspita Triana Dewi, Priyanka Rao, Jessica Burgner-Kahrs
IEEE International Conference on Soft Robotics, pp. 531-536, 2024.
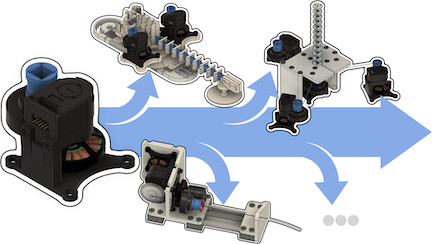
Open Continuum Robotics - One Actuation Module to Create them All
Reinhard M. Grassmann, Chengnan Shentu, Taqi Hamoda, Puspita Triana Dewi, Jessica Burgner-Kahrs
Frontiers in Robotics and AI, 11, 2024.
Universal-jointed Tendon-driven Continuum Robot - Design, Kinematic Modeling, and Locomotion in Narrow Tubes
Chengnan Shentu, Jessica Burgner-Kahrs
40th Anniversary of the IEEE International Conference on Robotics and Automation, 2024.
FAS - A Fully Actuated Segment for Tendon-Driven Continuum Robots
Reinhard Grassmann, Priyanka Rao, Quentin Peyron, Jessica Burgner-Kahrs
Frontiers in Robotics and AI, 9:873446 (19 pages), 2022.
Tendon-driven Continuum Robots with Extensible Sections - A Model-based Evaluation of Path Following Motions
E Amanov, T -D Nguyen, J Burgner-Kahrs
International Journal of Robotics Research, 40 (1), pp. 7-23, 2021.
Design of Lightweight and Extensible Tendon-Driven Continuum Robots using Origami Patterns
Yunti Xu, Quentin Peyron, Jongwoo Kim, Jessica Burgner-Kahrs
4th IEEE International Conference on Soft Robotics (RoboSoft), 2021.
Design of a Reconfigurable Parallel Continuum Robot with Tendon-Actuated Kinematic Chains
Georg Böttcher, Sven Lilge, Jessica Burgner-Kahrs
IEEE Robotics and Automation Letters, 6 (2), pp. 1272 - 1279, 2021.
Multi-Objective Particle Swarm Optimization for the Structural Design of Concentric Tube Continuum Robots for Medical Applications
Josephine Granna
PhD Thesis, Leibniz University Hannover, 2019.
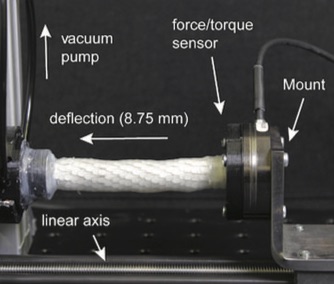
Stiffening Sheaths for Continuum Robots
Marlene Langer, Ernar Amanov, Jessica Burgner-Kahrs
Soft Robotics, 5 (3), pp. 291-303, 2018.
On the Merits of Helical Tendon Routing in Continuum Robots
Julia Starke, Ernar Amanov, Mohamed Taha Chikhaoui, Jessica Burgner-Kahrs
IEEE International Conference on Robotics and Automation, pp. 6470–6476, 2017.
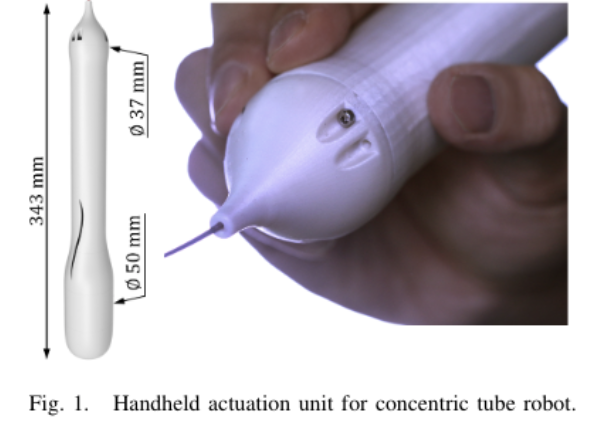
Towards Handheld Continuum Robots
V Modes, Thien-Dang Nguyen, J Burgner-Kahrs
DGR Days (German Society of Robotics), pp. 20, 2017.
Design, Fabrication, and Testing of a Needle-Sized Wrist for Surgical Instruments
Philip J Swaney, Peter A York, Hunter B Gilbert, Jessica Burgner-Kahrs, Robert Webster J III
Journal of Medical Devices, 11 (1), pp. 014501 (9 pages), 2017.
A Manual Actuation System for Laser Induced Thermal Therapy of Malignant Brain Tumors
J Granna, A Graf, A Nabavi, J Burgner-Kahrs
16th Annual Meeting of the German Society for Computer- and Robot-assisted Surgery, pp. 125–130, 2017.
How Can the Characteristics of Continuum Robots Be Optimized for a Specific Medical Application?
J Burgner-Kahrs
Latest Thinking, ISSN; 25105183., 2017.
Comparison of Optimization Algorithms for a Tubular Aspiration Robot for Maximum Coverage in Intracerebral Hemorrhage Evacuation
Josephine Granna, Yi Guo, Kyle D Weaver, Jessica Burgner-Kahrs
Journal of Medical Robotics Research, 2 (1), pp. 1750004 (9 pages), 2017.
Toward Improving Path Following Motion - Hybrid Continuum Robot Design
E Amanov, J Granna, J Burgner-Kahrs
IEEE International Conference on Robotics and Automation, pp. 4666-4672, 2017.
Towards Universal Continuum Manipulators
Ernar Amanov, Jessica Burgner-Kahrs
28th Conference of the international Society for Medical Innovation and Technology, 2016.
Continuum Robots for Medical Applications - A Survey
Jessica Burgner-Kahrs, Caleb D Rucker, Howie Choset
IEEE Transactions on Robotics, 31 (6), pp. 1261-1280, 2015.